

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Figure 1 shows a Motoman MH3F robot. This is a computer controlled six-joint robot, driven by six DC servomotors. The geometrical parameters of the
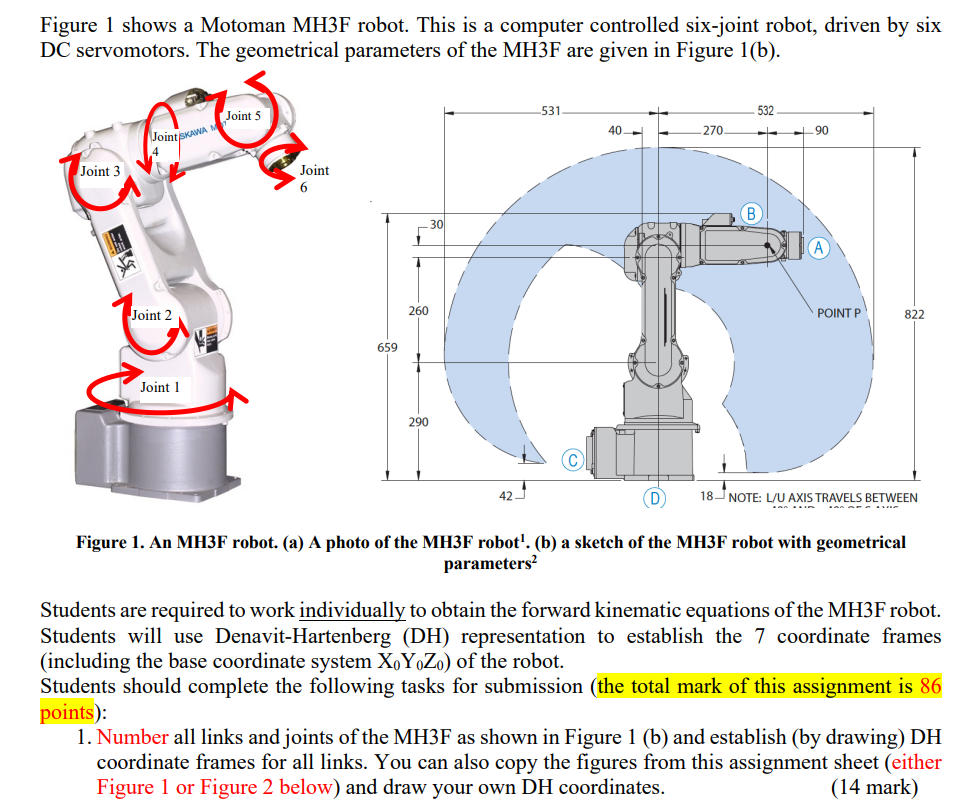
Figure 1 shows a Motoman MH3F robot. This is a computer controlled six-joint robot, driven by six DC servomotors. The geometrical parameters of the MH3F are given in Figure 1(b). Joint 5 Joint SKAWA Joint 3 Joint 2 Joint 1 Joint 6 659 260 290 30 -531. 532 40-- 270. _90 POINT P 822 42 J 18 NOTE: L/U AXIS TRAVELS BETWEEN Figure 1. An MH3F robot. (a) A photo of the MH3F robot. (b) a sketch of the MH3F robot with geometrical parameters Students are required to work individually to obtain the forward kinematic equations of the MH3F robot. Students will use Denavit-Hartenberg (DH) representation to establish the 7 coordinate frames (including the base coordinate system XoYoZo) of the robot. Students should complete the following tasks for submission (the total mark of this assignment is 86 points): 1. Number all links and joints of the MH3F as shown in Figure 1 (b) and establish (by drawing) DH coordinate frames for all links. You can also copy the figures from this assignment sheet (either Figure 1 or Figure 2 below) and draw your own DH coordinates. (14 mark)
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Fundamentals of Materials Science and Engineering An Integrated Approach
Authors: David G. Rethwisch
4th Edition
1118214226, 1118061608, 9781118214220, 978-1118061602