

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Figure 1 shows a single-link robot arm which is modeled as a pendulum with a concentrated mass m. In other words, the moment of
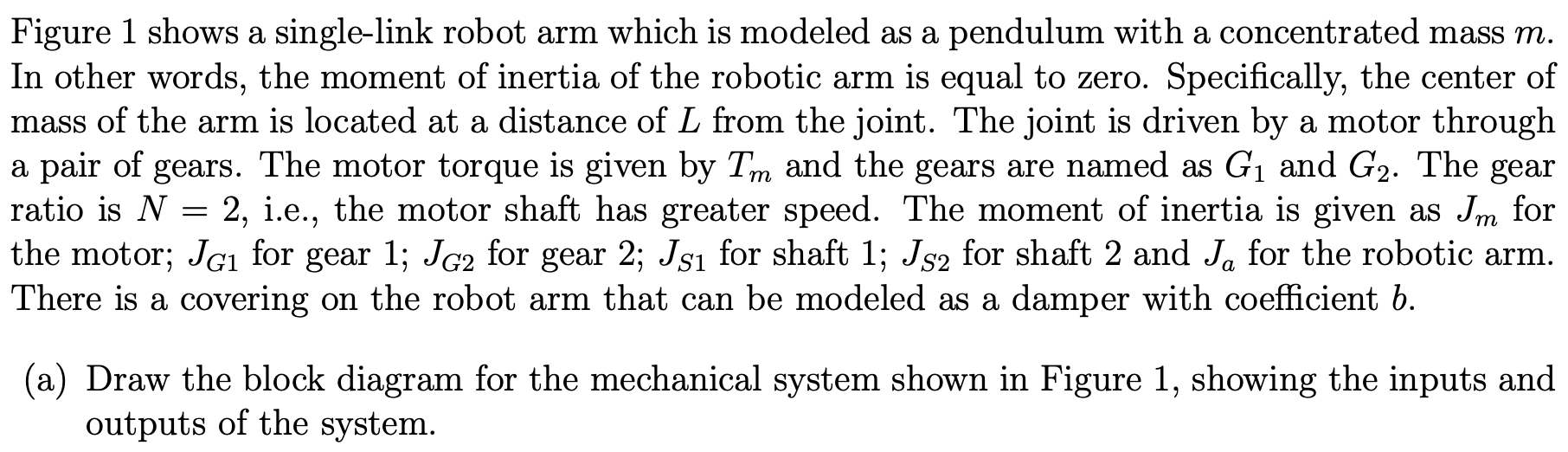
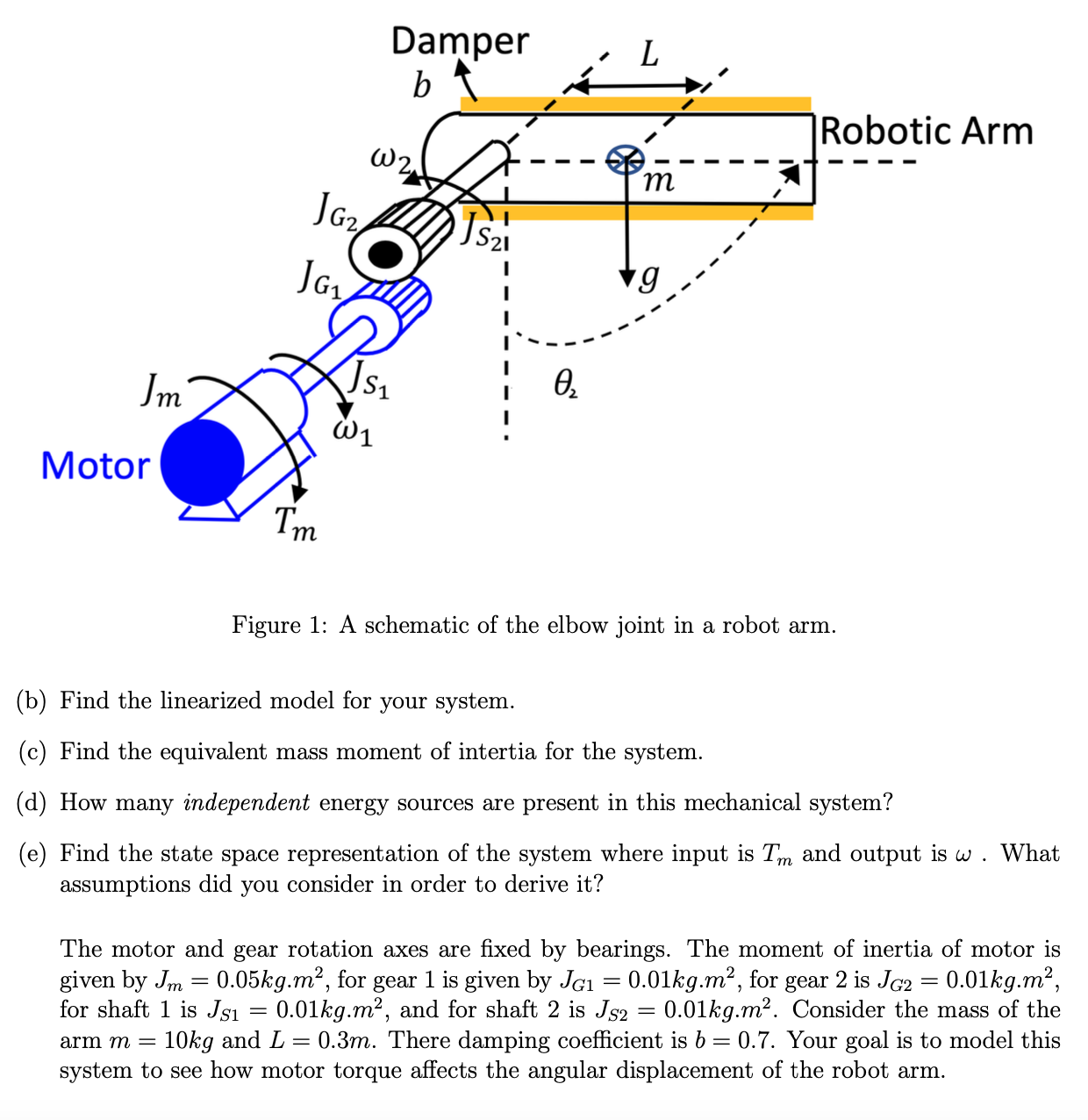
Figure 1 shows a single-link robot arm which is modeled as a pendulum with a concentrated mass m. In other words, the moment of inertia of the robotic arm is equal to zero. Specifically, the center of mass of the arm is located at a distance of L from the joint. The joint is driven by a motor through a pair of gears. The motor torque is given by Tm and the gears are named as G and G2. The gear ratio is N = 2, i.e., the motor shaft has greater speed. The moment of inertia is given as Jm for the motor; JG1 for gear 1; JG2 for gear 2; Js for shaft 1; Js2 for shaft 2 and Ja for the robotic arm. There is a covering on the robot arm that can be modeled as a damper with coefficient b. (a) Draw the block diagram for the mechanical system shown in Figure 1, showing the inputs and outputs of the system. Im Motor JG2 JG Tm Damper b W2 S21 JS , W1 m g Robotic Arm Figure 1: A schematic of the elbow joint in a robot arm. (b) Find the linearized model for your system. (c) Find the equivalent mass moment of intertia for the system. (d) How many independent energy sources are present in this mechanical system? (e) Find the state space representation of the system where input is Tm and output is w. What assumptions did you consider in order to derive it? The motor and gear rotation axes are fixed by bearings. The moment of inertia of motor is given by Jm = 0.05kg.m, for gear 1 is given by JG = 0.01kg.m, for gear 2 is JG2 = 0.01kg.m, for shaft 1 is JS1 0.01kg.m, and for shaft 2 is Js2 = 0.01kg.m. Consider the mass of the arm m = 10kg and L 0.3m. There damping coefficient is b = 0.7. Your goal is to model this system to see how motor torque affects the angular displacement of the robot arm. =
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Fundamentals of Ethics for Scientists and Engineers
Authors: Edmund G. Seebauer, Robert L. Barry
1st Edition
9780195698480, 195134885, 195698487, 978-0195134889