

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
FIGURE 3 . 2 0 : Schematic of a 3 R wrist in which all three axes intersect at a point and are mutually orthogonal.
FIGURE : Schematic of a wrist in which all three axes intersect at a point and
are mutually orthogonal. This design is used in the PUMA manipulator and many
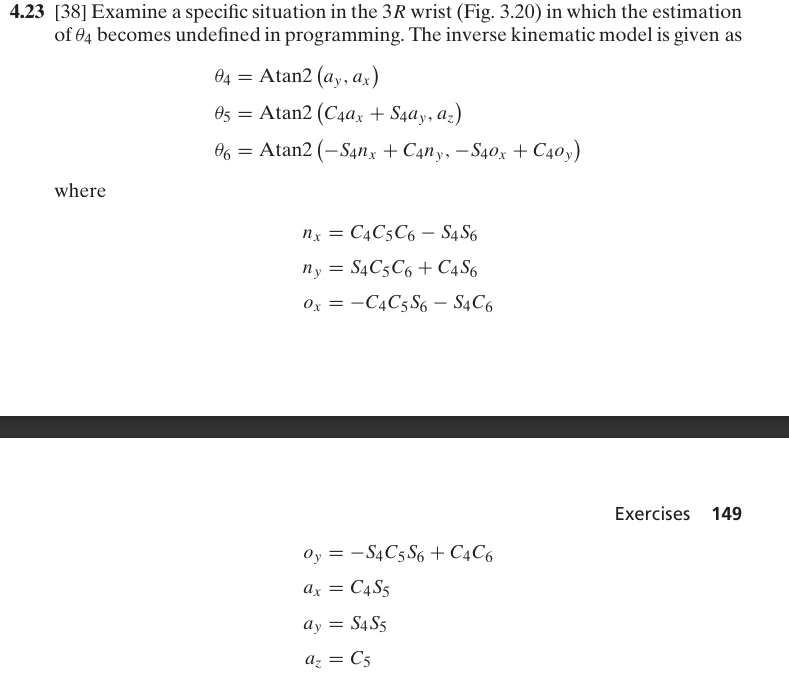
other industrial robots Examine a specific situation in the wrist Fig in which the estimation
of becomes undefined in programming. The inverse kinematic model is given as
Atan
Atan
Atan
where
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Professional SQL Server 2012 Internals And Troubleshooting
Authors: Christian Bolton, Justin Langford
1st Edition
1118177657, 9781118177655