

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
For the flexible body of Figure 2. Determine the open and closed loop transfer functions. ( Determine the steady state error if . Suggest a
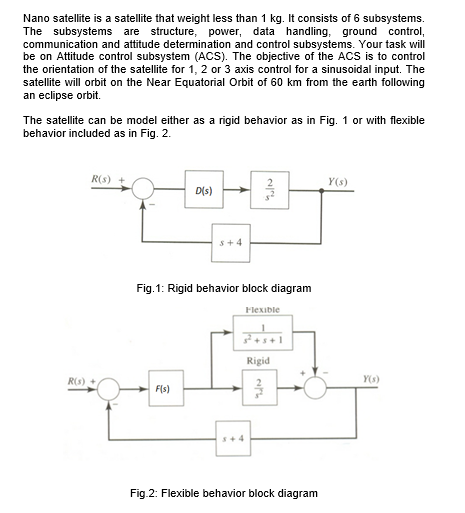
For the flexible body of Figure 2.
- Determine the open and closed loop transfer functions.
(
- Determine the steady state error if . Suggest a solution to ensure no steady-state error.
- Using Routh-Hurwitz Criteria, determine the maximum gain that can be used before the system become unstable.
- Obtain the time response of the systems for the value derived from (b).
- Using Zeigler-Nichols open-loop or closed-loop methods. Design the
- Proportional Controller
- Proportional-Integral Controller
- Proportional-Integral-Derivative Controller
- Based on the result of (e) suggest the best controller and support your argument through
- The time response and its rise time, percent overshoot, settling time and steady state error.
- Root locus plot and its maximum gain
- Bode plots and their corresponding Gain and Phase margin.
Please Answer all the question above. Need in Matlab and include the explaination.
Nano satellite is a satellite that weight less than 1 kg. It consists of 6 subsystems. The subsystems are structure, power, data handling, ground control, communication and attitude determination and control subsystems. Your task will be on Attitude control subsystem (ACS). The objective of the ACS is to control the orientation of the satellite for 1, 2 or 3 axis control for a sinusoidal input. The satellite will orbit on the Near Equatorial Orbit of 60 km from the earth following an eclipse orbit The satellite can be model either as a rigid behavior as in Fig. 1 or with flexible behavior included as in Fig. 2. R(S) Y(s) Dis) s + 4 Fig. 1: Rigid behavior block diagram Flexible 2+3+1 Rigid R(s) Y(3) F(s) with Fig. 2: Flexible behavior block diagram Nano satellite is a satellite that weight less than 1 kg. It consists of 6 subsystems. The subsystems are structure, power, data handling, ground control, communication and attitude determination and control subsystems. Your task will be on Attitude control subsystem (ACS). The objective of the ACS is to control the orientation of the satellite for 1, 2 or 3 axis control for a sinusoidal input. The satellite will orbit on the Near Equatorial Orbit of 60 km from the earth following an eclipse orbit The satellite can be model either as a rigid behavior as in Fig. 1 or with flexible behavior included as in Fig. 2. R(S) Y(s) Dis) s + 4 Fig. 1: Rigid behavior block diagram Flexible 2+3+1 Rigid R(s) Y(3) F(s) with Fig. 2: Flexible behavior block diagramStep by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Practical Auditing Techniques For ISO/TS 16949
Authors: Raymond Ness
1st Edition
978-0595273126