

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
For the two-link manipulator shown in Fig. 4: a) Generate a joint space trajectory 9d (t), 92.d (t), connecting the initial and final joint
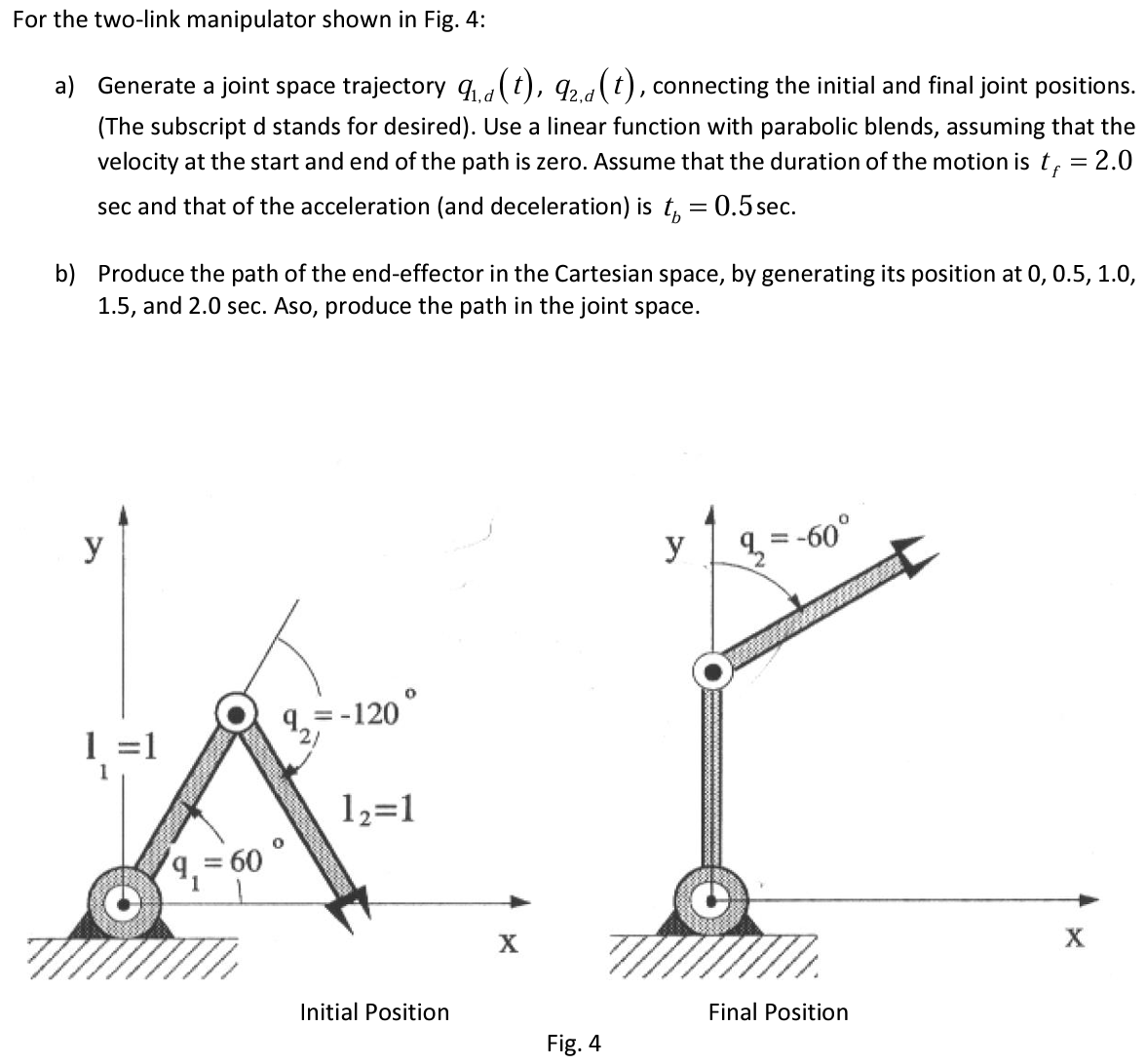
For the two-link manipulator shown in Fig. 4: a) Generate a joint space trajectory 9d (t), 92.d (t), connecting the initial and final joint positions. (The subscript d stands for desired). Use a linear function with parabolic blends, assuming that the velocity at the start and end of the path is zero. Assume that the duration of the motion is t = 2.0 sec and that of the acceleration (and deceleration) is t = 0.5 sec. b) Produce the path of the end-effector in the Cartesian space, by generating its position at 0, 0.5, 1.0, 1.5, and 2.0 sec. Aso, produce the path in the joint space. y =1 : 60 = =-120 21 1=1 Initial Position X Fig. 4 y 22 -60 Final Position X
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Elements Of Chemical Reaction Engineering
Authors: H. Fogler
6th Edition
013548622X, 978-0135486221