

Answered step by step
Verified Expert Solution
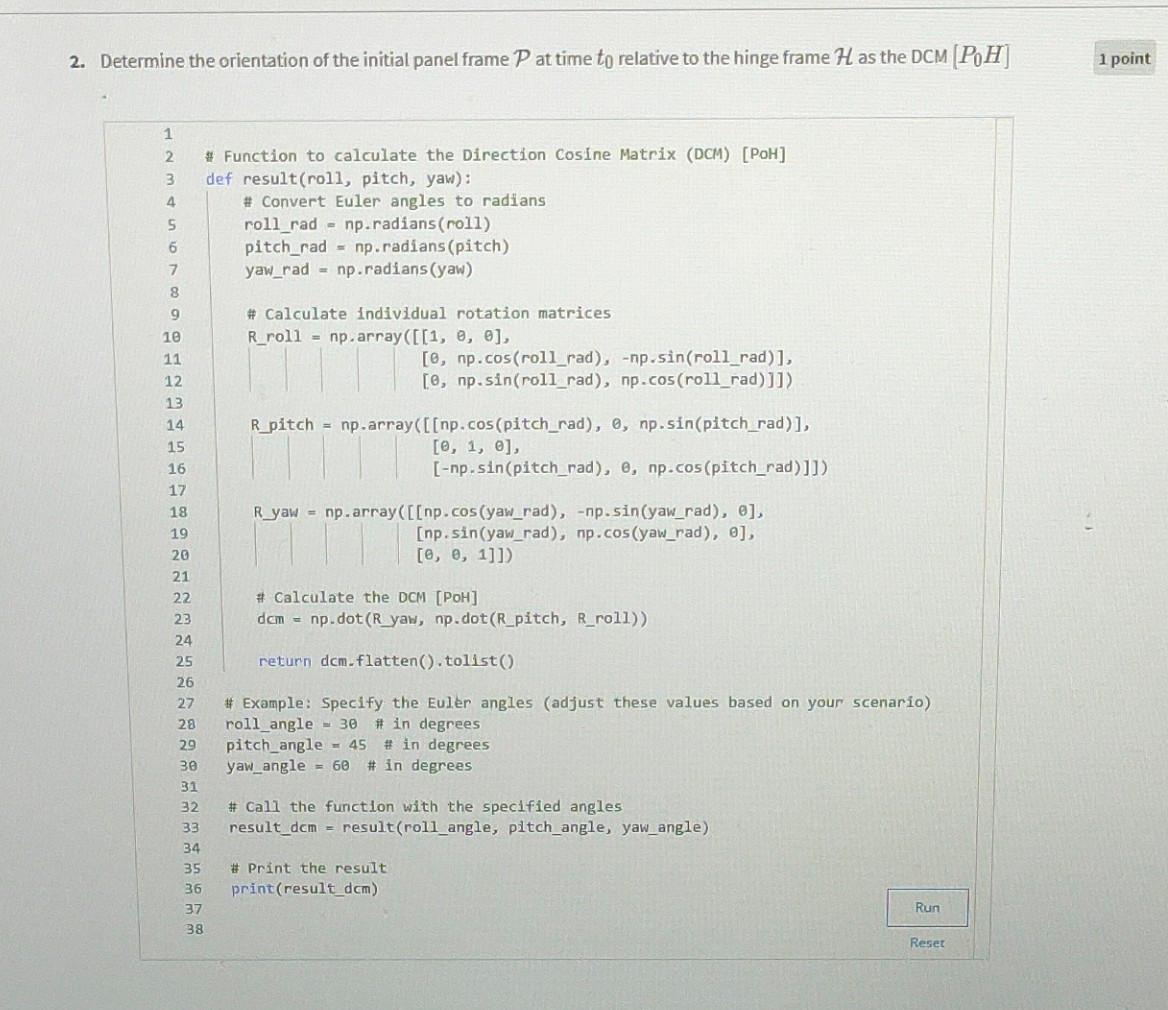
Question
1 Approved Answer
# Function to calculate the Direction Cosine Matrix (DCM) [POH] def result(roll, pitch, yaw): # Convert Euler angles to radians roll_rad =npradians(roll) pitch_rad =npradians(pitch) yaw_rad
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Rules In Database Systems Third International Workshop Rids 97 Sk Vde Sweden June 26 28 1997 Proceedings Lncs 1312
Authors: Andreas Geppert ,Mikael Berndtsson
1997th Edition
3540635165, 978-3540635161