

Question
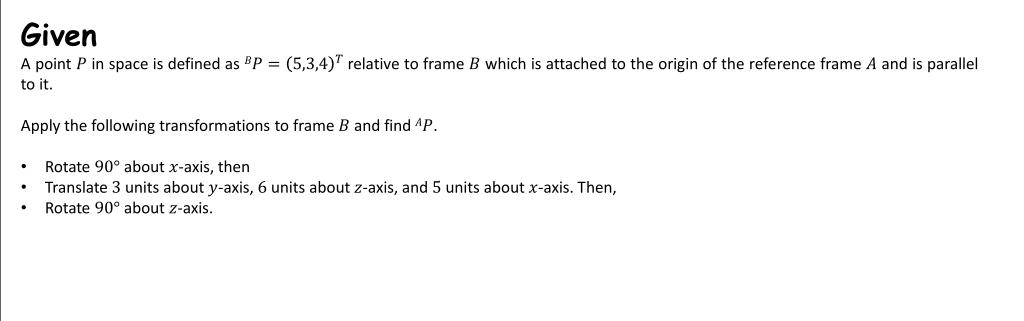
Given A point P in space is defined as ^(B)P=(5,3,4)^(T) relative to frame B which is attached to the origin of the reference frame A
Given\ A point
Pin space is defined as
^(B)P=(5,3,4)^(T)relative to frame
Bwhich is attached to the origin of the reference frame
Aand is parallel to it.\ Apply the following transformations to frame
Band find
^(A)P.\ Rotate
90\\\\deg about
x-axis, then\ Translate 3 units about
y-axis, 6 units about
z-axis, and 5 units about
x-axis. Then,\ Rotate
90\\\\deg about
z-axis.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Database Concepts
Authors: David Kroenke, David Auer, Scott Vandenberg, Robert Yoder
9th Edition
0135188148, 978-0135188149, 9781642087611