

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
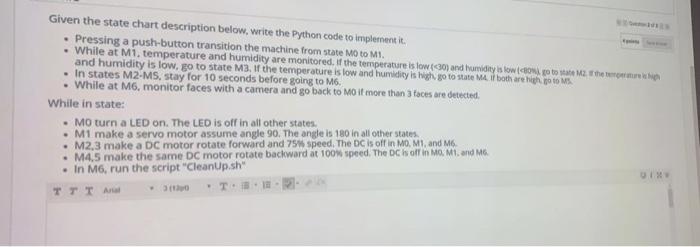
Given the state chart description below. write the Python code to implement it. Pressing a push-button transition the machine from state Moto MI. . While
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Excel As Your Database
Authors: Paul Cornell
1st Edition
1590597516, 978-1590597514