

Question
Hi, can you solve these questions clearly showing the final answers.This is on Jupyterhub and it requires coding.Can you also show the working used? if
Hi, can you solve these questions clearly showing the final answers.This is on Jupyterhub and it requires coding.Can you also show the working used? if you need further information let me know..Please solve all 4 parts thanks
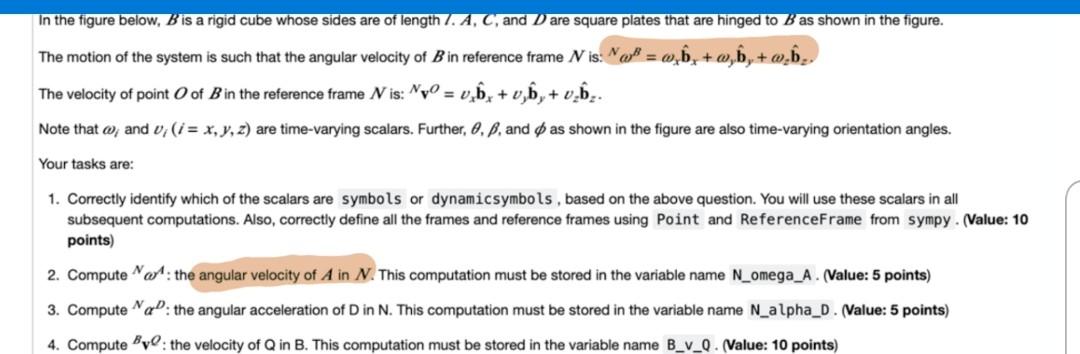
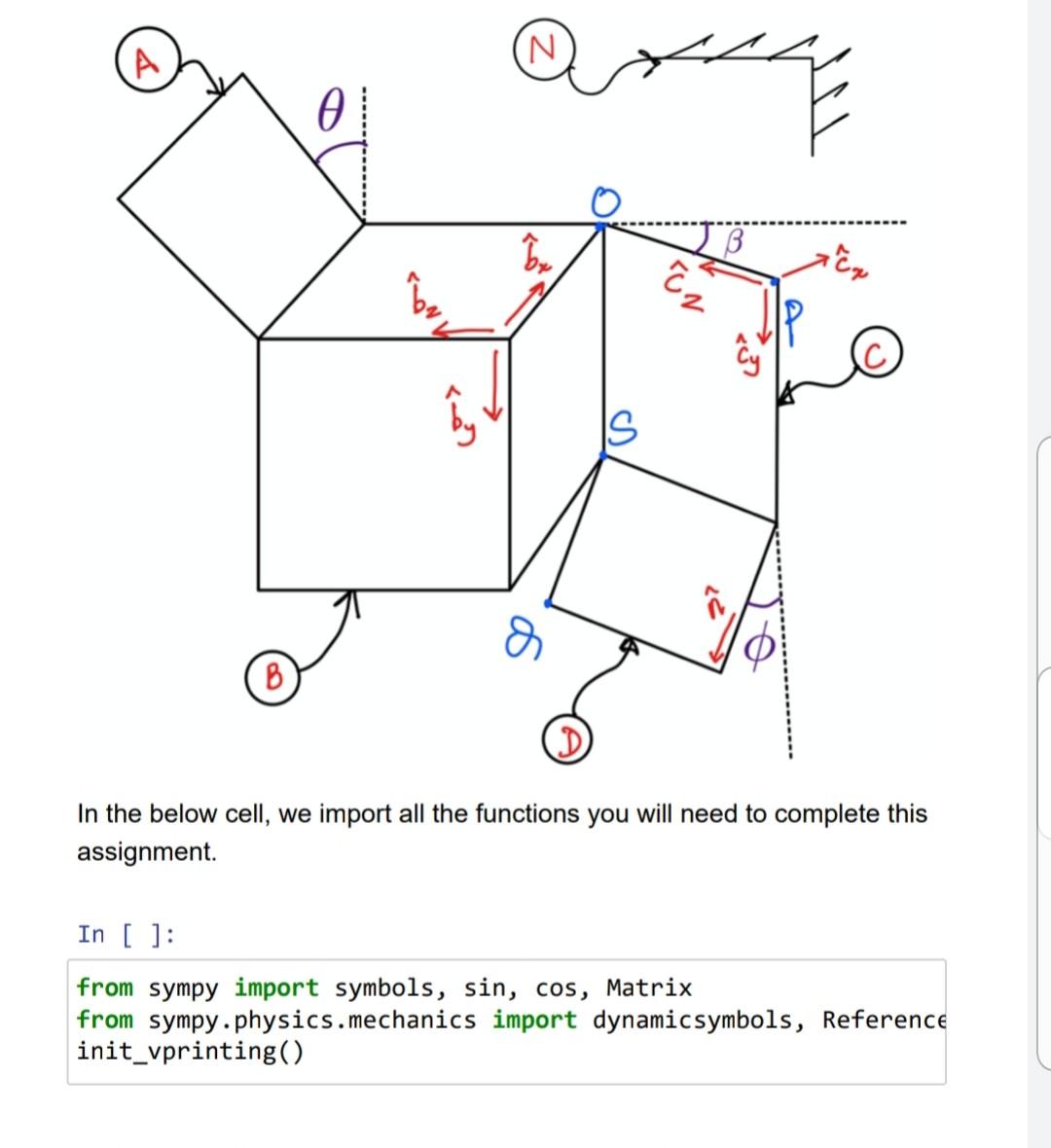
In the figure below, B is a rigid cube whose sides are of length 7. A, C, and D are square plates that are hinged to B as shown in the figure. The motion of the system is such that the angular velocity of B in reference frame N is: Nw = w+ a, b, +wh.. The velocity of point of B in the reference frame Nis: Ny = v 6x + 0,,+ vb. Note that w, and v;(i= x, y, z) are time-varying scalars. Further, 0, B. and as shown in the figure are also time-varying orientation angles. Your tasks are: 1. Correctly identify which of the scalars are symbols or dynamicsymbols, based on the above question. You will use these scalars in all subsequent computations. Also, correctly define all the frames and reference frames using Point and ReferenceFrame from sympy. (Value: 10 points) 2. Compute: the angular velocity of A in N. This computation must be stored in the variable name N_omega_A. Value: 5 points) 3. ComputeNqP: the angular acceleration of Din N. This computation must be stored in the variable name N_alpha_D. (Value: 5 points) 4. Compute By: the velocity of Q in B. This computation must be stored in the variable name B_v_Q. (Value: 10 points) N. ax 0 be B a&a cz Ina, 27 & B D In the below cell, we import all the functions you will need to complete this assignment. In [ ]: from sympy import symbols, sin, cos, Matrix from sympy.physics.mechanics import dynamicsymbols, Reference init_vprinting() In the figure below, B is a rigid cube whose sides are of length 7. A, C, and D are square plates that are hinged to B as shown in the figure. The motion of the system is such that the angular velocity of B in reference frame N is: Nw = w+ a, b, +wh.. The velocity of point of B in the reference frame Nis: Ny = v 6x + 0,,+ vb. Note that w, and v;(i= x, y, z) are time-varying scalars. Further, 0, B. and as shown in the figure are also time-varying orientation angles. Your tasks are: 1. Correctly identify which of the scalars are symbols or dynamicsymbols, based on the above question. You will use these scalars in all subsequent computations. Also, correctly define all the frames and reference frames using Point and ReferenceFrame from sympy. (Value: 10 points) 2. Compute: the angular velocity of A in N. This computation must be stored in the variable name N_omega_A. Value: 5 points) 3. ComputeNqP: the angular acceleration of Din N. This computation must be stored in the variable name N_alpha_D. (Value: 5 points) 4. Compute By: the velocity of Q in B. This computation must be stored in the variable name B_v_Q. (Value: 10 points) N. ax 0 be B a&a cz Ina, 27 & B D In the below cell, we import all the functions you will need to complete this assignment. In [ ]: from sympy import symbols, sin, cos, Matrix from sympy.physics.mechanics import dynamicsymbols, Reference init_vprinting()Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Main Memory Database Systems
Authors: Frans Faerber, Alfons Kemper, Per-Åke Alfons
1st Edition
1680833243, 978-1680833249