

Question
How do I modify the code to instead load the data into three vectors, one for each of the three variables? Also, how would I
How do I modify the code to instead load the data into three vectors, one for each of the three variables? Also, how would I set up the equation to calculate the position for each time step?
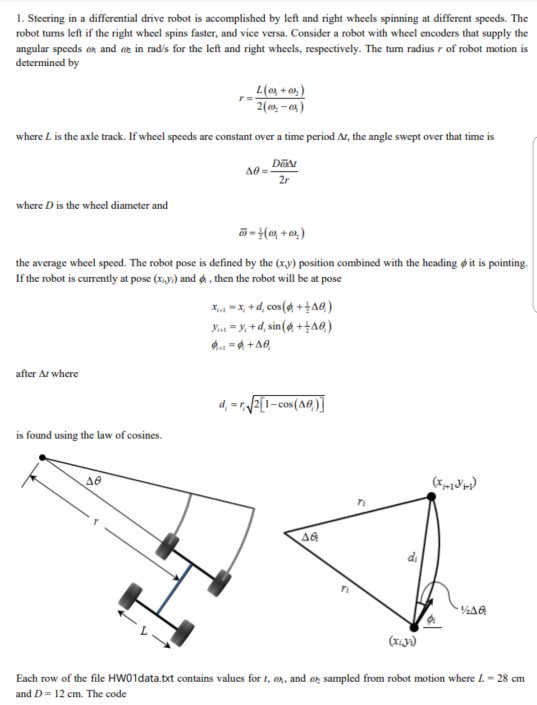
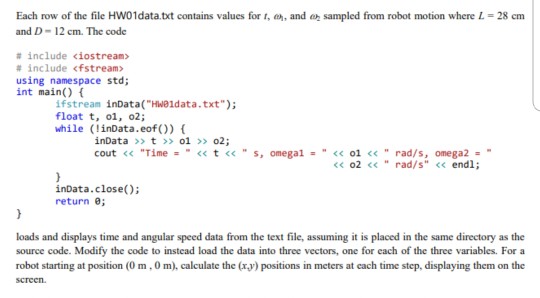
1. Steering in a differential drive robot is accomplished by left and right wheels spinning at different speeds. The robot tuns left if the right wheel spins faster, and vice versa. Consider a robot with wheel encoders that supply the angular speeds o and ein rad/s for the left and right wheels, respectively. The turn radius r of robot motion is determined by 2(m-) where L is the axle track. If wheel speeds are constant over a time period Ar, the angle swept over that time is 2r where D is the wheel diameter and the average wheel speed. The robot pose is defined by the (y) position combined with the heading-it is pointing. Ifthe robot is currently at pose (xoy) and s.. then the robot will be at pose Nm-y, + d, sin(a +#AQ ) after , where is found using the law of cosines. Fi de ri Each row ofthe file Hw0ldata.txt contains values fr t, deh-and esampled from robot motion where L-28 cm and D=12cm. The code
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Advances In Databases And Information Systems 22nd European Conference Adbis 2018 Budapest Hungary September 2 5 2018 Proceedings Lncs 11019
Authors: Andras Benczur ,Bernhard Thalheim ,Tomas Horvath
1st Edition
3319983970, 978-3319983974