

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
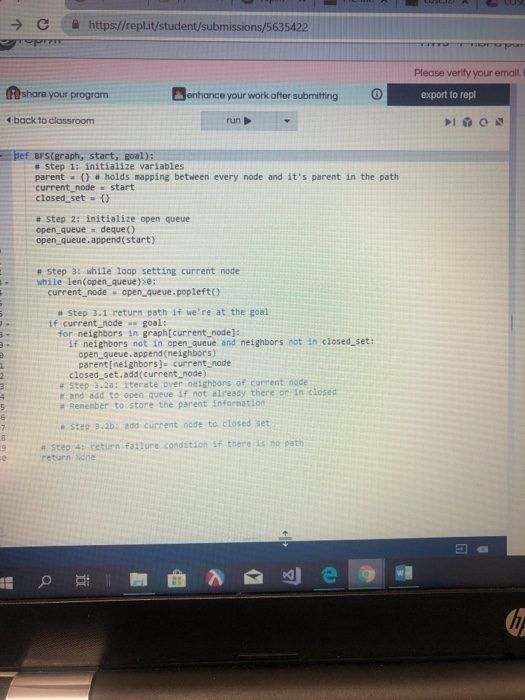
https://repl.it/student/submissions/5635422 Please verify your email I share your program anhance your work after submitting O export to repl 4back to classroom run pef BES(graph, start,
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Database Reliability Engineering Designing And Operating Resilient Database Systems
Authors: Laine Campbell, Charity Majors
1st Edition
978-1491925942