

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
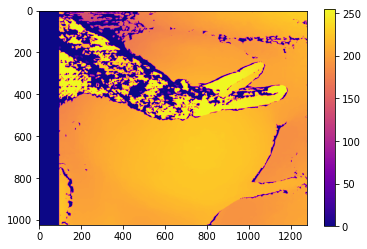
I have the below code which gives me the diameter of the shaft in pixels, could you help ammend this so I can get it
I have the below code which gives me the diameter of the shaft in pixels, could you help ammend this so I can get it in mm instead? import cv
import numpy as np
import matplotlib.pyplot as plt
# Function to safely load images and resize if they don't match
def loadandresizeimagesleftimagepath, rightimagepath:
leftimage cvimreadleftimagepath, cvIMREADGRAYSCALE
rightimage cvimreadrightimagepath, cvIMREADGRAYSCALE
if leftimage is None or rightimage is None:
printError loading images"
return None, None
try:
# Resize the images to a common size if they don't match
if leftimage.shape rightimage.shape:
commonsize minleftimage.shape rightimage.shape minleftimage.shape rightimage.shape
leftimage cvresizeleftimage, commonsize
rightimage cvresizerightimage, commonsize
except Exception as e:
printfError resizing images: e
return None, None
return leftimage, rightimage
# Paths to the images
leftimagepath 'leftframe.png
rightimagepath 'rightframe.png
# Your camera parameters are already defined in your code.
intrinsicmatrix nparray
distortioncoeffs nparrayeee
intrinsicmatrix nparray
distortioncoeffs nparrayeee
R nparrayeee
ee
eee
T nparrayee
# Load, undistort, and rectify images
leftimage, rightimage loadandresizeimagesleftframe.png 'rightframe.png
# Check if the images were loaded correctly
if leftimage is None or rightimage is None:
raise ValueErrorImages could not be loaded or found."
def undistortandrectifyimagesleftimage, rightimage, intrinsicmatrix distortioncoeffs intrinsicmatrix distortioncoeffs R T:
# Load images
leftimage cvimreadleftimagepath, cvIMREADGRAYSCALE
rightimage cvimreadrightimagepath, cvIMREADGRAYSCALE
# Undistort images
leftimageundistorted cvundistortleftimage, intrinsicmatrix distortioncoeffs
rightimageundistorted cvundistortrightimage, intrinsicmatrix distortioncoeffs
# Stereo rectification computes the rotation matrices for each camera
R R P P Q cvstereoRectifyintrinsicmatrix distortioncoeffs intrinsicmatrix distortioncoeffs
leftimage.shape:: R T
# Apply rectification
mapx mapy cvinitUndistortRectifyMapintrinsicmatrix distortioncoeffs R P leftimage.shape:: cvCVFC
mapx mapy cvinitUndistortRectifyMapintrinsicmatrix distortioncoeffs R P rightimage.shape:: cvCVFC
leftimagerectified cvremapleftimageundistorted, mapx mapy cvINTERLINEAR
rightimagerectified cvremaprightimageundistorted, mapx mapy cvINTERLINEAR
return leftimagerectified, rightimagerectified, Q
# Perform stereo rectification and undistortion using the provided camera parameters
leftimagerectified, rightimagerectified, Q undistortandrectifyimagesleftimage, rightimage, intrinsicmatrix distortioncoeffs intrinsicmatrix distortioncoeffs R T
# Tune these parameters for better results
mindisparity
numdisparities # Increase in multiples of
blocksize # Must be odd, increase for smoother but less detailed images
uniquenessratio # Increase to discard more false matches
specklewindowsize # Increase to discard more noise but risk losing detail
specklerange # Increase for wider range of disparity changes to consider as belonging to the same object
# Initialize the stereo block matching object
stereo cvStereoSGBMcreate
minDisparitymindisparity,
numDisparitiesnumdisparities,
blockSizeblocksize,
uniquenessRatiouniquenessratio,
speckleWindowSizespecklewindowsize,
speckleRangespecklerange,
dispMaxDiff
P blocksize
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Oracle Database 12c Dba Handbook Manage A Scalable Secure Oracle Enterprise Database Environment
Authors: Bob Bryla
1st Edition
0071798781, 978-0071798785