

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
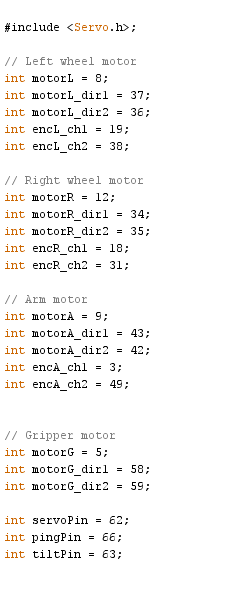
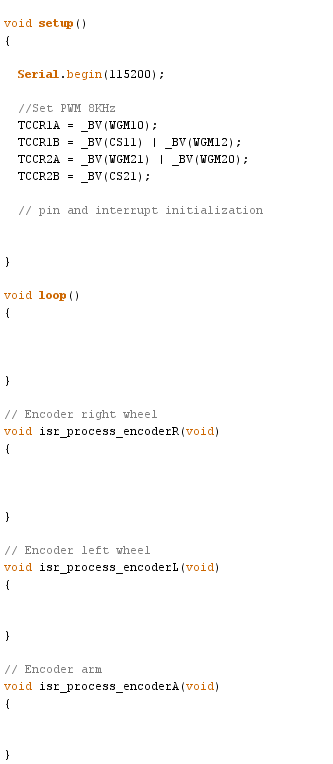
I need help! THis is what i have so far but need more! please help! i want it to go fast too as well! i
I need help! THis is what i have so far but need more! please help! i want it to go fast too as well! i am using arduino language!
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Advances In Databases And Information Systems Uropean Conference Adbis 2020 Lyon France August 25 27 2020 Proceedings Lncs 12245
Authors: Jerome Darmont ,Boris Novikov ,Robert Wrembel
1st Edition
3030548317, 978-3030548315