

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
I. Single Movement from One Position to another Position Set the orientation of the robot at start point as a straight line to locate endpoint
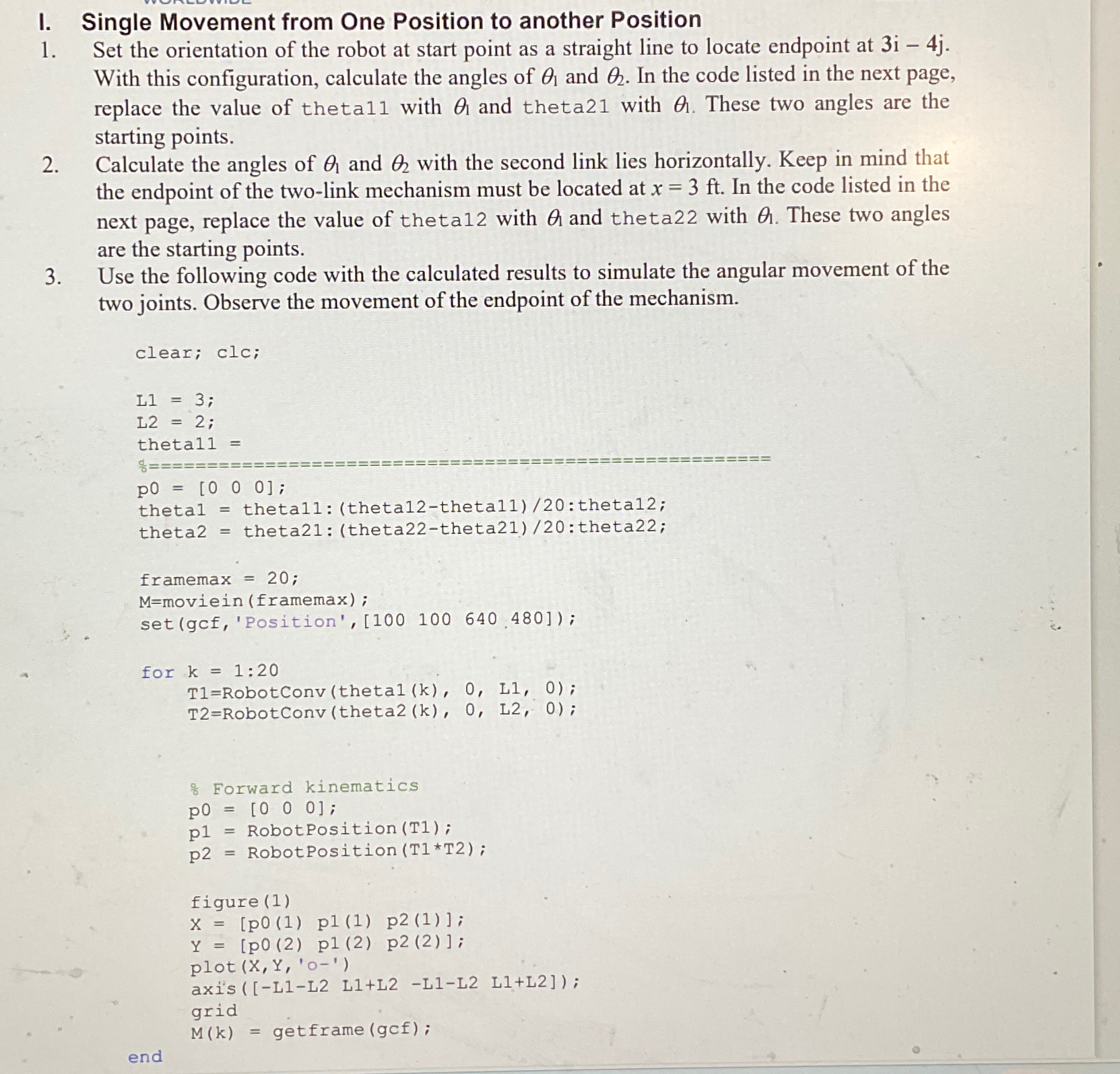
I. Single Movement from One Position to another Position
Set the orientation of the robot at start point as a straight line to locate endpoint at With this configuration, calculate the angles of and In the code listed in the next page, replace the value of theta with and theta with These two angles are the starting points.
Calculate the angles of and with the second link lies horizontally. Keep in mind that the endpoint of the twolink mechanism must be located at In the code listed in the next page, replace the value of theta with and theta with These two angles are the starting points.
Use the following code with the calculated results to simulate the angular movement of the two joints. Observe the movement of the endpoint of the mechanism.
clear; clc;
;
L;
thetal
;
thetal thetal: thetatheta: thetal;
theta theta: thetatheta: theta;
framemax ;
Mmoviein framemax;
for :
RobotConv;
RobotConv;
Forward kinematics
;
RobotPosition ;
RobotPosition
p RobotPosition T;
p RobotPosition ;
figure
p p;
;
plot X Y O
axisLL LLLL LL;
grid
getframe;
end
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Advances In Spatial Databases 5th International Symposium Ssd 97 Berlin Germany July 15 18 1997 Proceedings Lncs 1262
Authors: Michel Scholl ,Agnes Voisard
1st Edition
3540632387, 978-3540632382