

Question
I want to create a two MATLAB functions for a 3DoF system robotic arm that has yaw, pitch and pitch roatation. The first one is
I want to create a two MATLAB functions for a 3DoF system robotic arm that has yaw, pitch and pitch roatation. The first one is the forward kinematics that will give the position of the end effector for given angles. And second one is the inverse kinematics which will give the angles for the given positions. Use MATLAB symbollic toolbox.Joint 1 is yaw rotation, joint 2 and 3 are pitch rotations. 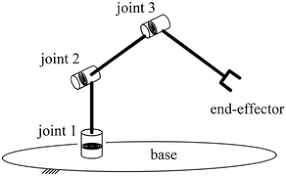
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Microsoft Visual Basic 2008 Comprehensive Concepts And Techniques
Authors: Gary B. Shelly, Corinne Hoisington
1st Edition
1423927168, 978-1423927167