

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
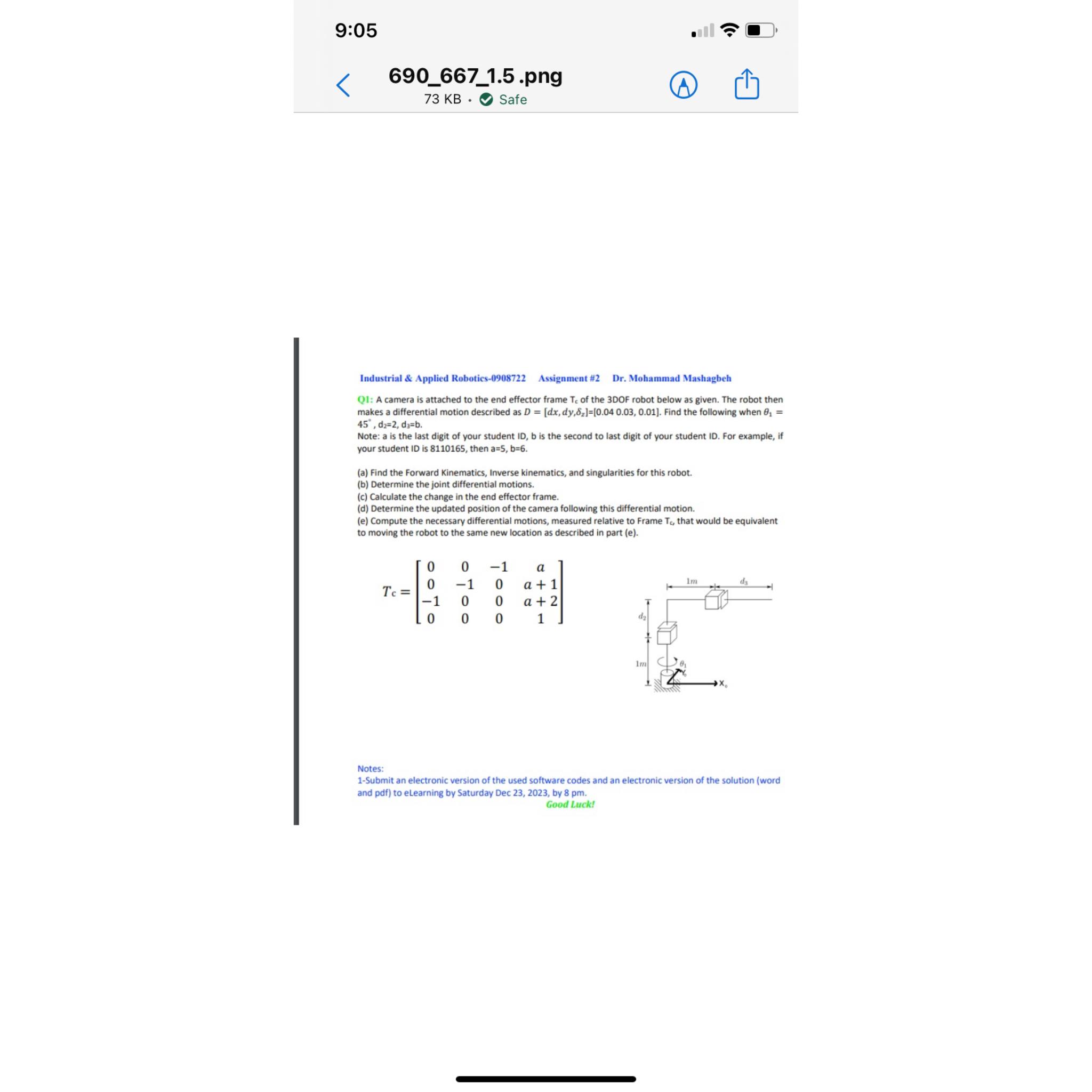
Industrial & Applied Robotics - 0 9 0 8 7 2 2 Assignment # 2 Q 1 : A camera is attached to the end
Industrial & Applied Robotics Assignment # Q: A camera is attached to the end effector frame Tc of the DOF robot below as given. The robot thenmakes a differential motion described as Ddxdydelta z Find the following when theta deg ddbNote: a is the last digit of your student ID b is the second to last digit of your student ID For example, ifour student ID is then ab my id is: a Find the Forward Kinematics, Inverse kinematics, and singularities for this robot.b Determine the joint differential motions.c Calculate the change in the end effector frame.d Determine the updated position of the camera following this differential motion.e Compute the necessary differential motions, measured relative to Frame Tc that would be equivalentto moving the robot to the same new location as described in part eTcaaaNotes:Submit an electronic version of the used software codes and an electronic version of the solution wordand pdf to eLearning by Saturday Dec by pm
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Fundamentals Of Hydraulic Engineering Systems
Authors: Robert J. Houghtalen, A. Osman H. Akan, Ned H. C. Hwang
4th Edition
136016383, 978-0136016380