

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
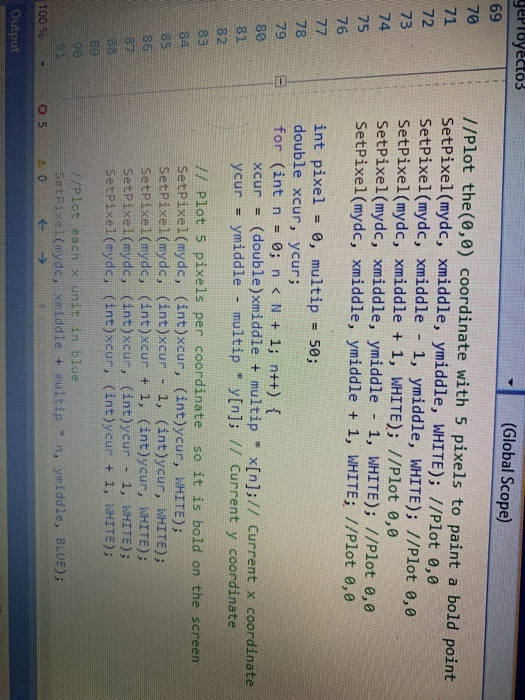
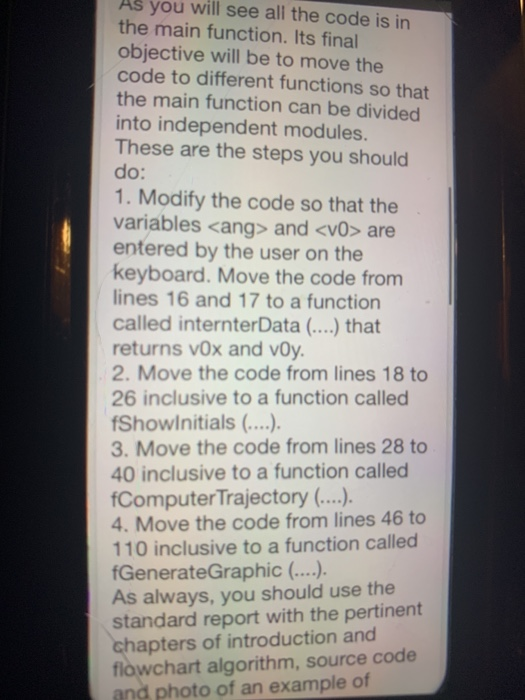
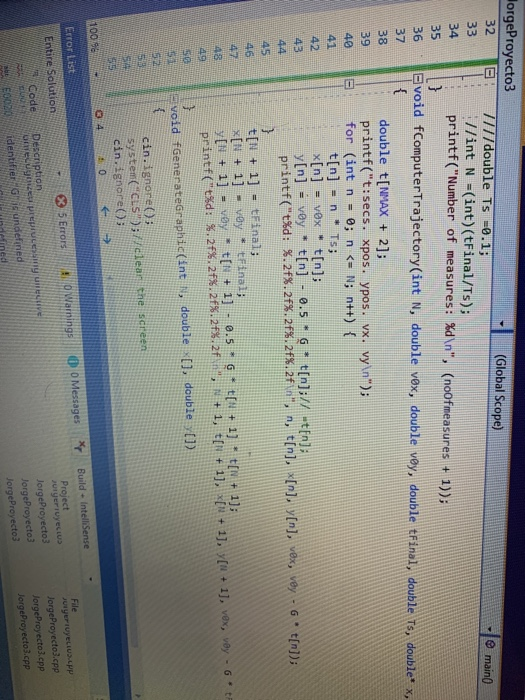
Instruction: Fix the error in the lines 32,51,19,71,72,73,74,7584,85,86,87,88,75,54,32,51 and 54. Create the program and move the lines to compile Instruction: Fix the 5 errors in
Instruction: Fix the error in the lines 32,51,19,71,72,73,74,7584,85,86,87,88,75,54,32,51 and 54.
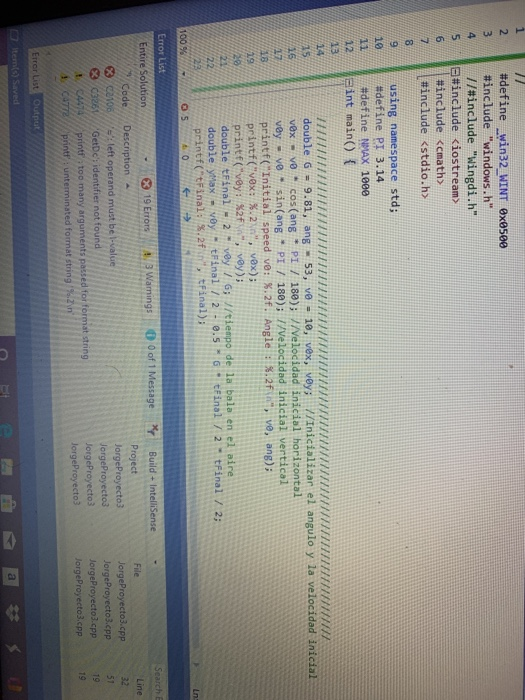
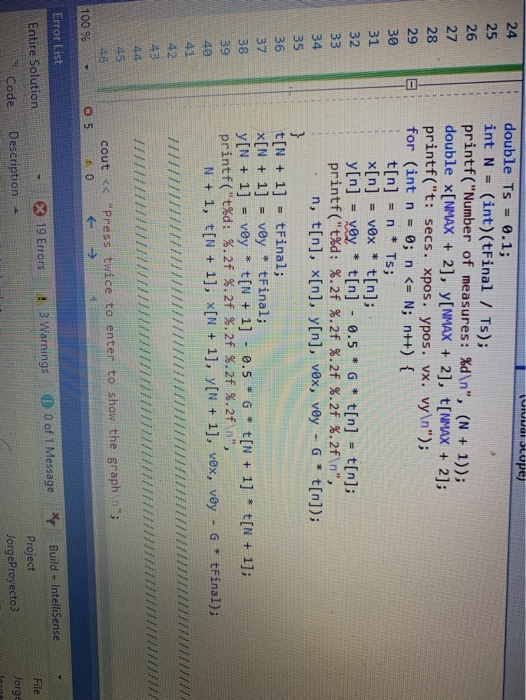
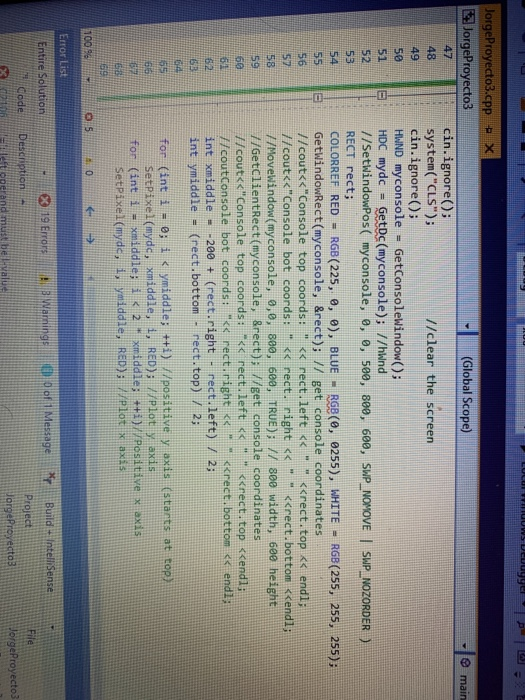
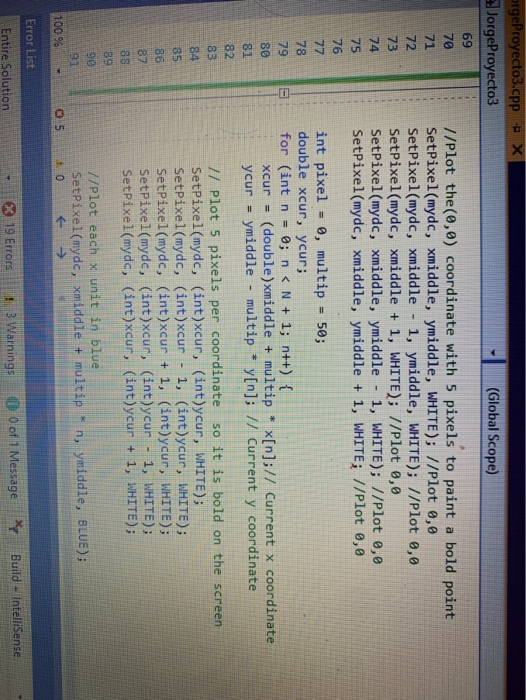
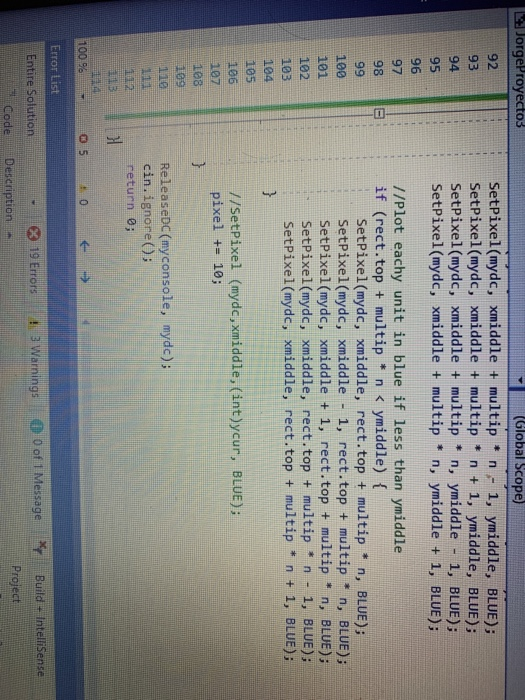
Create the program and move the lines to compile 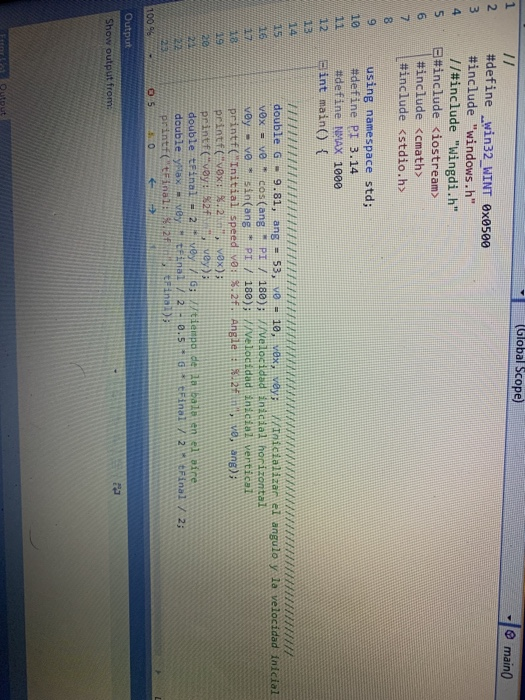
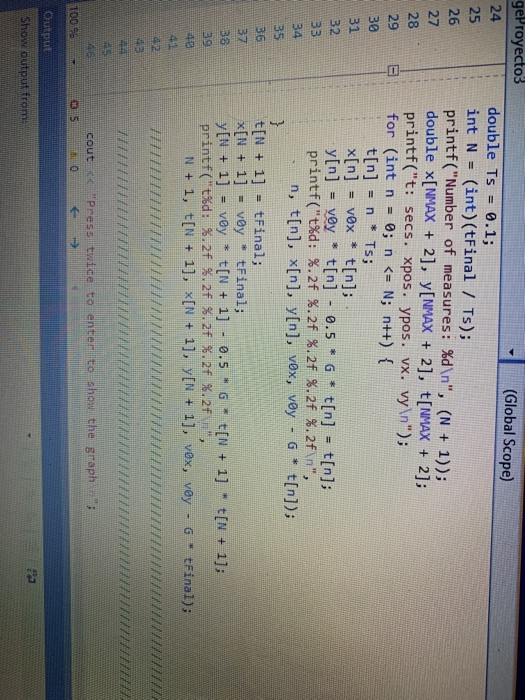
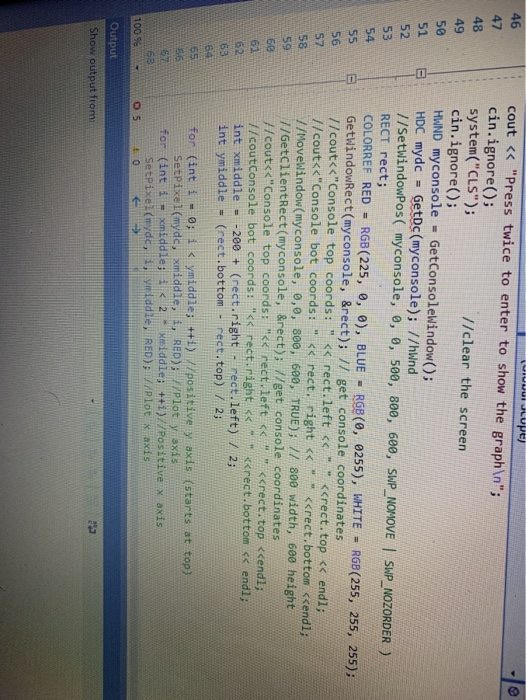
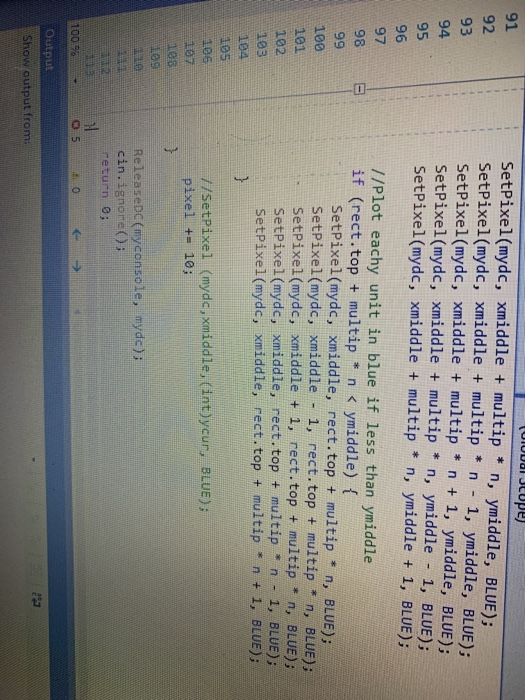
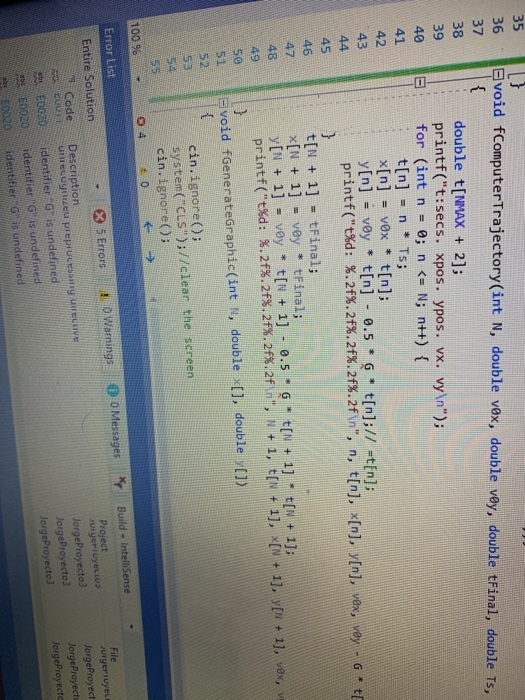
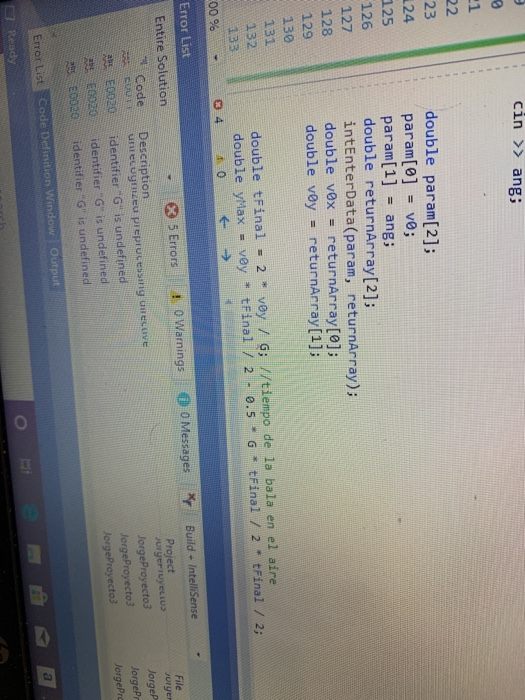
Instruction: Fix the 5 errors in the lines 9,9, 43, 48 and 132 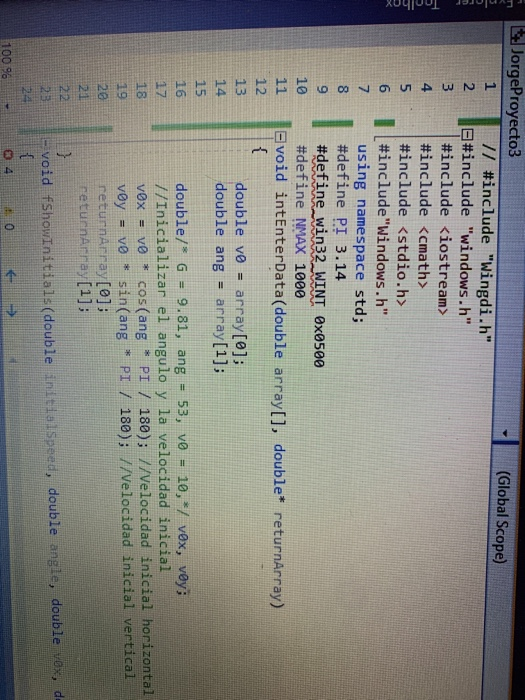
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Creating A Database In Filemaker Pro Visual QuickProject Guide
Authors: Steven A. Schwartz
1st Edition
0321321219, 978-0321321213