

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Integrate the forward velocity to obtain displacement and compare with GPS displacement. We simplify the description of the motion by assuming that the vehicle
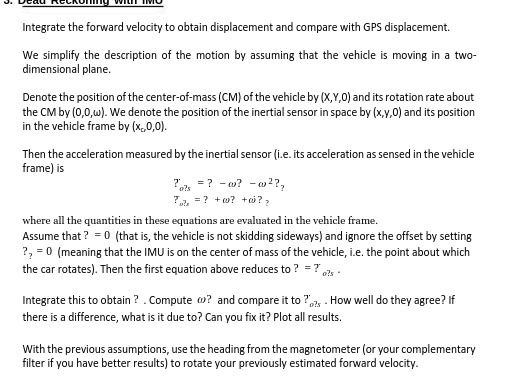
Integrate the forward velocity to obtain displacement and compare with GPS displacement. We simplify the description of the motion by assuming that the vehicle is moving in a two- dimensional plane. Denote the position of the center-of-mass (CM) of the vehicle by (X,Y,0) and its rotation rate about the CM by (0,0,w). We denote the position of the inertial sensor in space by (x,y,0) and its position in the vehicle frame by (x,,0,0). Then the acceleration measured by the inertial sensor (i.e. its acceleration as sensed in the vehicle frame) is ?o?s = ? -@? - w?, 7x = ? +0? +0?? where all the quantities in these equations are evaluated in the vehicle frame. Assume that? = 0 (that is, the vehicle is not skidding sideways) and ignore the offset by setting ? = 0 (meaning that the IMU is on the center of mass of the vehicle, i.e. the point about which the car rotates). Then the first equation above reduces to ? = ?o?s - Integrate this to obtain ?. Compute ? and compare it to ?? How well do they agree? If there is a difference, what is it due to? Can you fix it? Plot all results. With the previous assumptions, use the heading from the magnetometer (or your complementary filter if you have better results) to rotate your previously estimated forward velocity.
Step by Step Solution
There are 3 Steps involved in it
Step: 1
To integrate the forward velocity and obtain displacement we can use numerical integration technique...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Fundamentals of Applied Electromagnetics
Authors: Fawwaz T. Ulaby, Eric Michielssen, Umberto Ravaioli
6th edition
132139316, 978-0132139311