

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
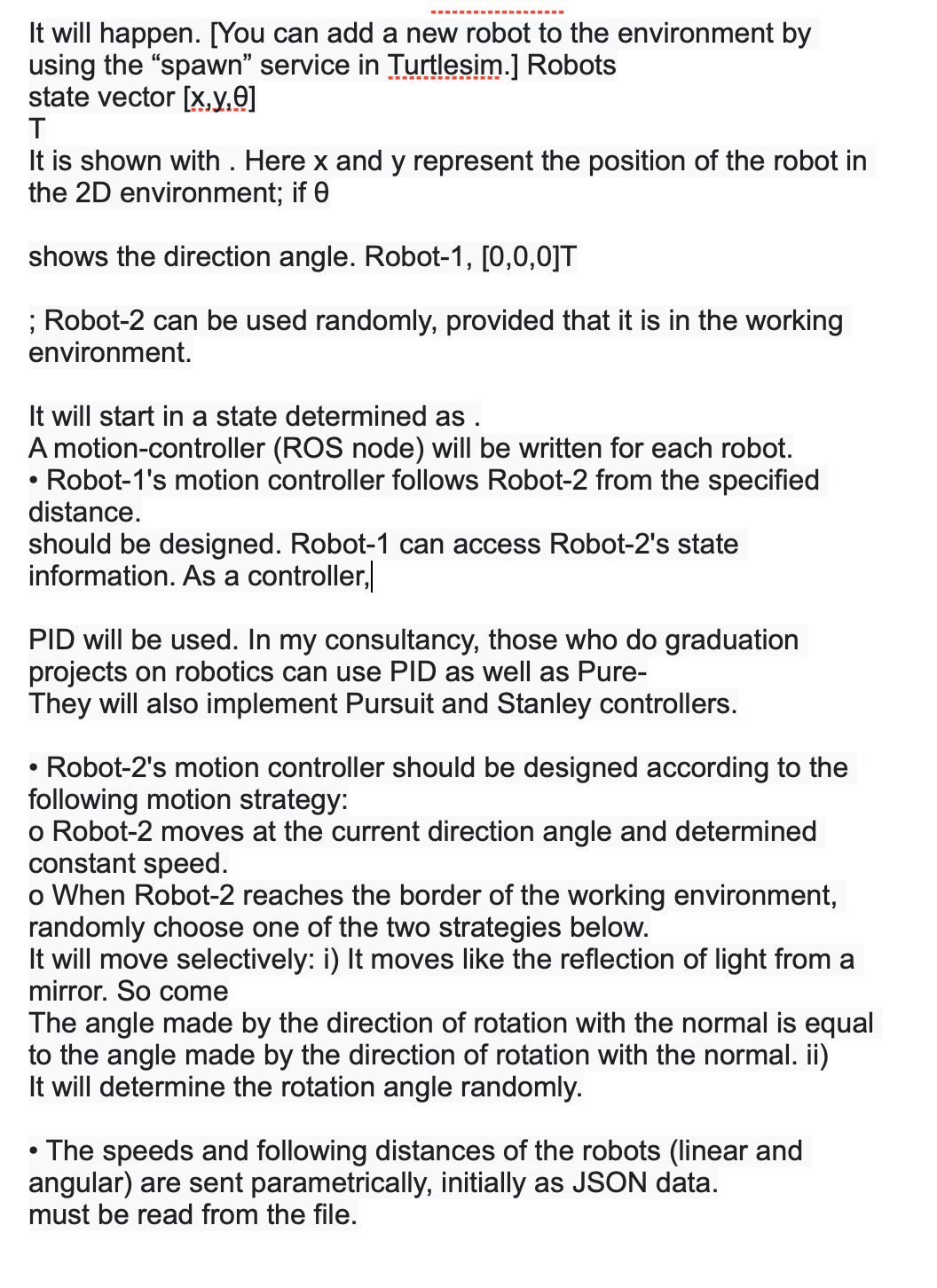
It will happen. [ You can add a new robot to the environment by using the spawn service in Turtlesim. ] Robots state vector x
It will happen. You can add a new robot to the environment by
using the "spawn" service in Turtlesim. Robots
state vector
T
It is shown with. Here and represent the position of the robot in
the environment; if
shows the direction angle. Robot
; Robot can be used randomly, provided that it is in the working
environment.
It will start in a state determined as
A motioncontroller ROS node will be written for each robot.
Robots motion controller follows Robot from the specified
distance.
should be designed. Robot can access Robots state
information. As a controller,
PID will be used. In my consultancy, those who do graduation
projects on robotics can use PID as well as Pure
They will also implement Pursuit and Stanley controllers.
Robots motion controller should be designed according to the
following motion strategy:
o Robot moves at the current direction angle and determined
constant speed.
o When Robot reaches the border of the working environment,
randomly choose one of the two strategies below.
It will move selectively: i It moves like the reflection of light from a
mirror. So come
The angle made by the direction of rotation with the normal is equal
to the angle made by the direction of rotation with the normal. ii
It will determine the rotation angle randomly.
The speeds and following distances of the robots linear and
angular are sent parametrically, initially as JSON data.
must be read from the file.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Implementing Ai And Machine Learning For Business Optimization
Authors: Robert K Wiley
1st Edition
B0CPQJW72N, 979-8870675855