

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Lagrange ( 4 0 pts ) - Using Lagrangian techniques, find the necessary expressions of torque for each joint of the Robot Arm shown in
Lagrange pts Using Lagrangian techniques, find the necessary expressions of torque for each joint of the Robot Arm shown in figures a and A pts Using the joint planar arm in figures a and draw and label the arm with the joints indicating the axis components for each joint. Assume that the center of mass is located at the midpoint of the link. Let Link L has mass M Link L has mass M and Link L has mass M B pts Find the velocity square terms for the arm. C pts Find the expression for the kinetic energy of the arm where D pts Find the potential energy of the arm where E pts Write the Lagrange term in terms of and F pts Find the Torques necessary for each joint. Note: For this problem, you may assume the following joint position configuration for simplicity of drawing and labeling. 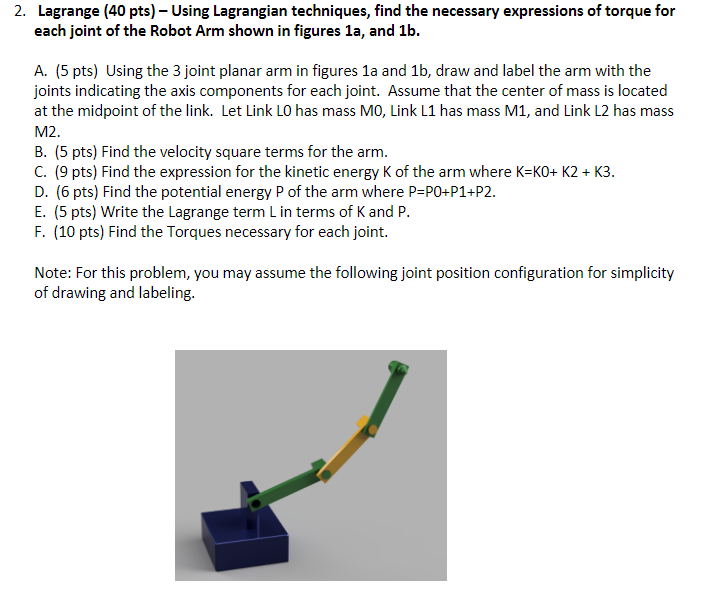
Lagrange pts Using Lagrangian techniques, find the necessary expressions of torque for
each joint of the Robot Arm shown in figures a and
A pts Using the joint planar arm in figures a and draw and label the arm with the
joints indicating the axis components for each joint. Assume that the center of mass is located
at the midpoint of the link. Let Link L has mass M Link L has mass M and Link L has mass
M
B pts Find the velocity square terms for the arm.
C pts Find the expression for the kinetic energy of the arm where
D pts Find the potential energy of the arm where
E pts Write the Lagrange term in terms of and
F pts Find the Torques necessary for each joint.
Note: For this problem, you may assume the following joint position configuration for simplicity
of drawing and labeling.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Administering Relational Databases On Microsoft Azure A Detail Paradigm To Support Sql On Azure Cloud And Dp 300 Study Guide
Authors: Prashanth Jayaram ,Ahmad Yaseen ,Rajendra Gupta
1st Edition
979-8706128029