

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
LIVCuucu Jyslelis DESIBILI (LLTILBULU, yeal 41 THIUllas Ual Llall 8. The PIC18F has a number of different primary clocking modes. Three of these modes are
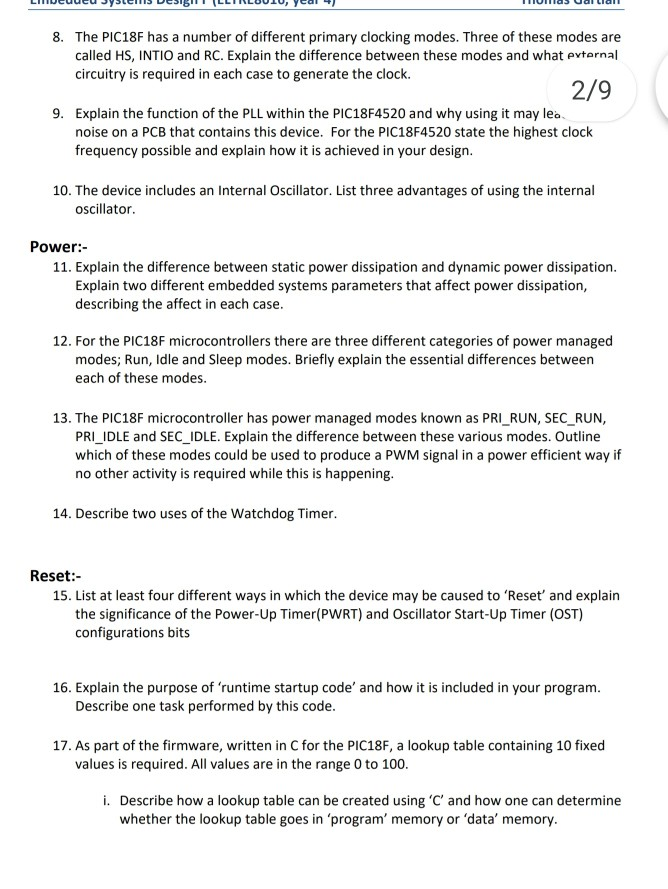
LIVCuucu Jyslelis DESIBILI (LLTILBULU, yeal 41 THIUllas Ual Llall 8. The PIC18F has a number of different primary clocking modes. Three of these modes are called HS, INTIO and RC. Explain the difference between these modes and what external circuitry is required in each case to generate the clock. 2/9 9. Explain the function of the PLL within the PIC18F4520 and why using it may lea noise on a PCB that contains this device. For the PIC18F4520 state the highest clock frequency possible and explain how it is achieved in your design. 10. The device includes an Internal Oscillator. List three advantages of using the internal oscillator. Power:- 11. Explain the difference between static power dissipation and dynamic power dissipation. Explain two different embedded systems parameters that affect power dissipation, describing the affect in each case. 12. For the PIC18F microcontrollers there are three different categories of power managed modes; Run, Idle and Sleep modes. Briefly explain the essential differences between each of these modes. 13. The PIC18F microcontroller has power managed modes known as PRI_RUN, SEC_RUN, PRI_IDLE and SEC_IDLE. Explain the difference between these various modes. Outline which of these modes could be used to produce a PWM signal in a power efficient way if no other activity is required while this is happening. 14. Describe two uses of the Watchdog Timer Reset:- 15. List at least four different ways in which the device may be caused to 'Reset' and explain the significance of the Power-Up Timer(PWRT) and Oscillator Start-Up Timer (OST) configurations bits 16. Explain the purpose of 'runtime startup code and how it is included in your program. Describe one task performed by this code. 17. As part of the firmware, written in C for the PIC18F, a lookup table containing 10 fixed values is required. All values are in the range 0 to 100. i. Describe how a lookup table can be created using 'C' and how one can determine whether the lookup table goes in 'program' memory or 'data' memory. LIVCuucu Jyslelis DESIBILI (LLTILBULU, yeal 41 THIUllas Ual Llall 8. The PIC18F has a number of different primary clocking modes. Three of these modes are called HS, INTIO and RC. Explain the difference between these modes and what external circuitry is required in each case to generate the clock. 2/9 9. Explain the function of the PLL within the PIC18F4520 and why using it may lea noise on a PCB that contains this device. For the PIC18F4520 state the highest clock frequency possible and explain how it is achieved in your design. 10. The device includes an Internal Oscillator. List three advantages of using the internal oscillator. Power:- 11. Explain the difference between static power dissipation and dynamic power dissipation. Explain two different embedded systems parameters that affect power dissipation, describing the affect in each case. 12. For the PIC18F microcontrollers there are three different categories of power managed modes; Run, Idle and Sleep modes. Briefly explain the essential differences between each of these modes. 13. The PIC18F microcontroller has power managed modes known as PRI_RUN, SEC_RUN, PRI_IDLE and SEC_IDLE. Explain the difference between these various modes. Outline which of these modes could be used to produce a PWM signal in a power efficient way if no other activity is required while this is happening. 14. Describe two uses of the Watchdog Timer Reset:- 15. List at least four different ways in which the device may be caused to 'Reset' and explain the significance of the Power-Up Timer(PWRT) and Oscillator Start-Up Timer (OST) configurations bits 16. Explain the purpose of 'runtime startup code and how it is included in your program. Describe one task performed by this code. 17. As part of the firmware, written in C for the PIC18F, a lookup table containing 10 fixed values is required. All values are in the range 0 to 100. i. Describe how a lookup table can be created using 'C' and how one can determine whether the lookup table goes in 'program' memory or 'data' memory
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Database Basics Computer EngineeringInformation Warehouse Basics From Science
Authors: Odiljon Jakbarov ,Anvarkhan Majidov
1st Edition
620675183X, 978-6206751830