

Question
Necessary explanations (port adresses and descriptions) for robotic control are given at below, examine them carefully. According to this, write the assembly program for 8086
Necessary explanations (port adresses and descriptions) for robotic control are given at below, examine them carefully. According to this, write the assembly program for 8086 microprocessor that controls the robot sequentially as described below.
1) If the last command execution is successful and the robot is ready for the new command execution, search for an obstacle / object in front of the robot with the SEARCH command and go to step 2.
2) If the robot has completed the research process, ie if there is new data in the data register:
a) No obstacles / objects; move forward, turn right and go to step 1.
b) There is an obstacle / object in front of it; turn left and go to step 1.
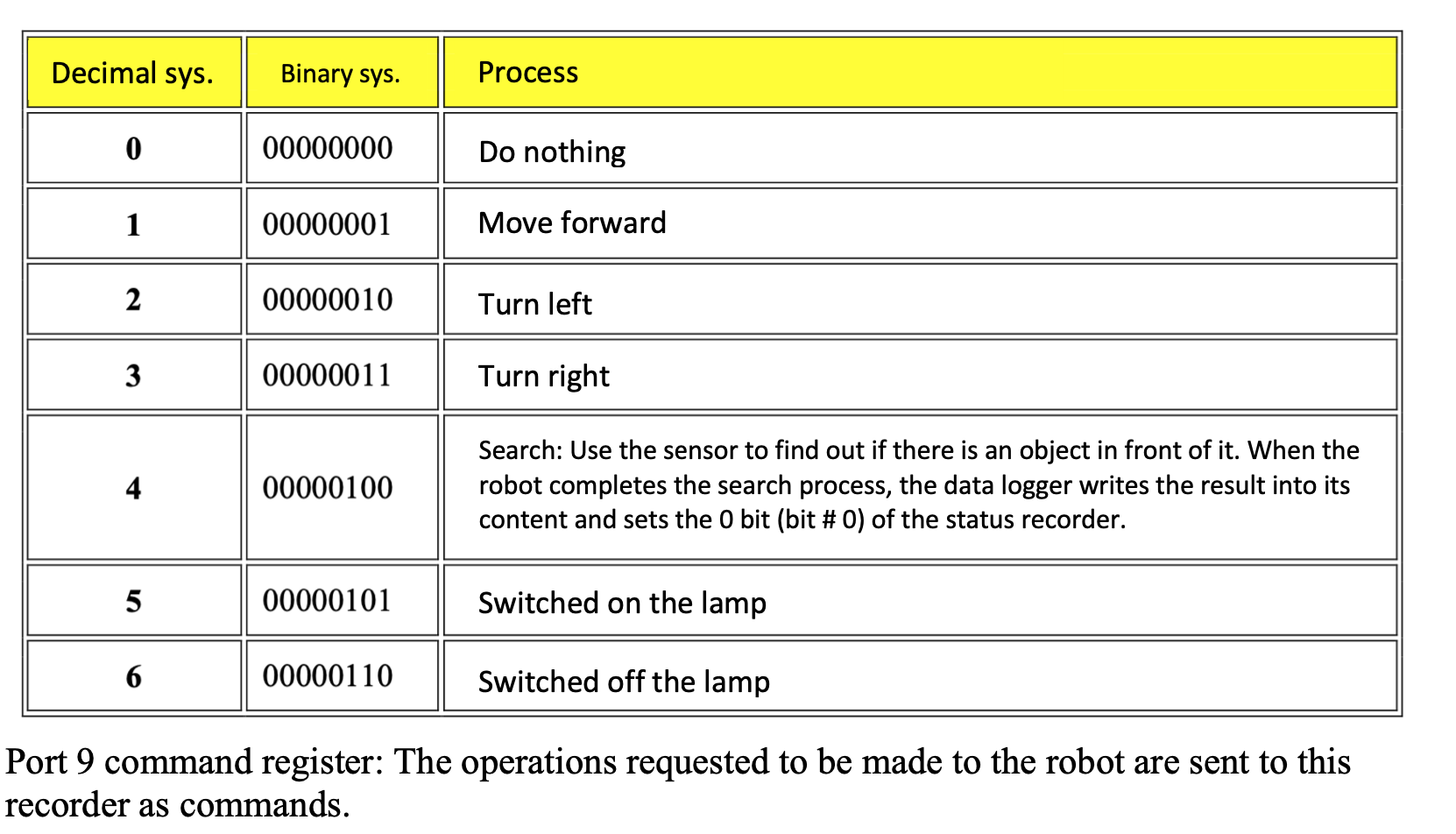
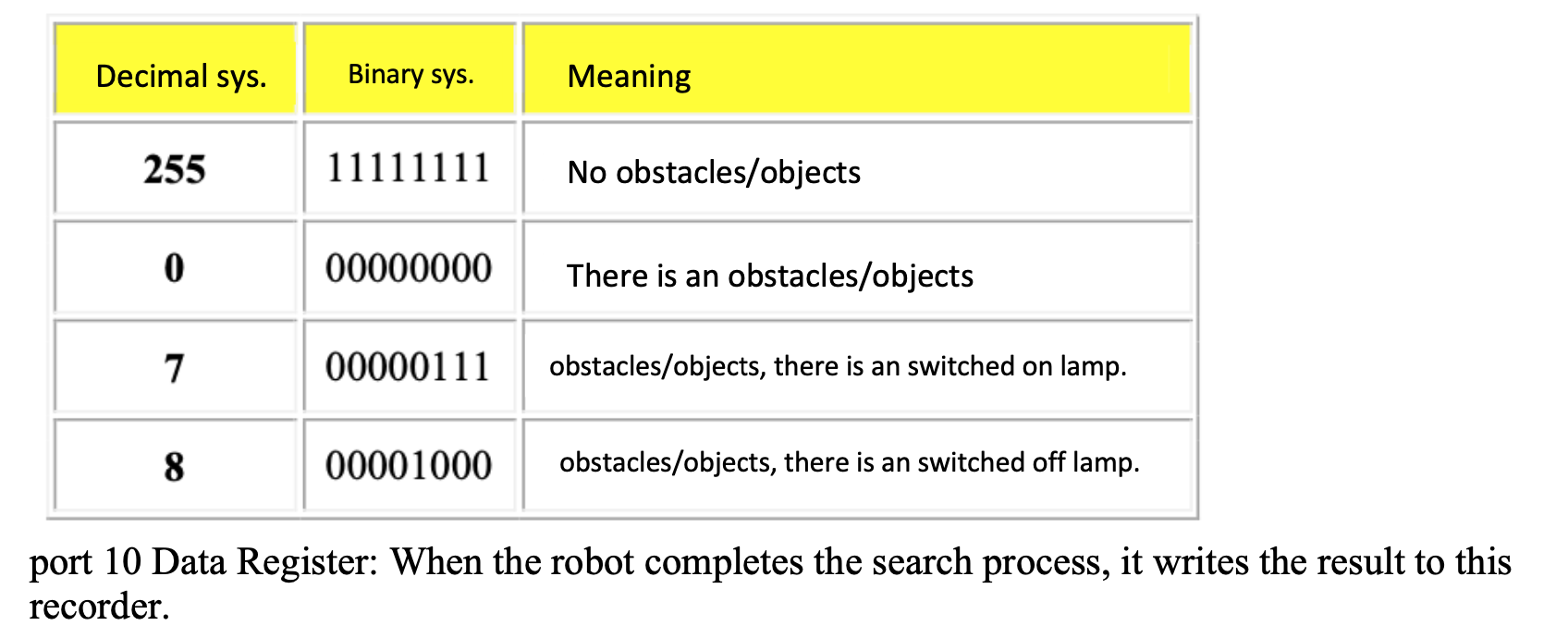
Decimal sys. Binary sys. Process 0 00000000 Do nothing 1 00000001 Move forward 2 00000010 Turn left 3 00000011 Turn right 4 00000100 Search: Use the sensor to find out if there is an object in front of it. When the robot completes the search process, the data logger writes the result into its content and sets the 0 bit (bit # 0) of the status recorder. 5 00000101 Switched on the lamp 6 00000110 Switched off the lamp Port 9 command register: The operations requested to be made to the robot are sent to this recorder as commands. Decimal sys. Binary sys. Meaning 255 11111111 No obstacles/objects 0 00000000 There is an obstacles/objects 7 00000111 obstacles/objects, there is an switched on lamp. 8 00001000 obstacles/objects, there is an switched off lamp. port 10 Data Register: When the robot completes the search process, it writes the result to this recorder. Decimal sys. Binary sys. Process 0 00000000 Do nothing 1 00000001 Move forward 2 00000010 Turn left 3 00000011 Turn right 4 00000100 Search: Use the sensor to find out if there is an object in front of it. When the robot completes the search process, the data logger writes the result into its content and sets the 0 bit (bit # 0) of the status recorder. 5 00000101 Switched on the lamp 6 00000110 Switched off the lamp Port 9 command register: The operations requested to be made to the robot are sent to this recorder as commands. Decimal sys. Binary sys. Meaning 255 11111111 No obstacles/objects 0 00000000 There is an obstacles/objects 7 00000111 obstacles/objects, there is an switched on lamp. 8 00001000 obstacles/objects, there is an switched off lamp. port 10 Data Register: When the robot completes the search process, it writes the result to this recorder
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Data And Information Quality Dimensions, Principles And Techniques
Authors: Carlo Batini, Monica Scannapieco
1st Edition
3319241060, 9783319241067