

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
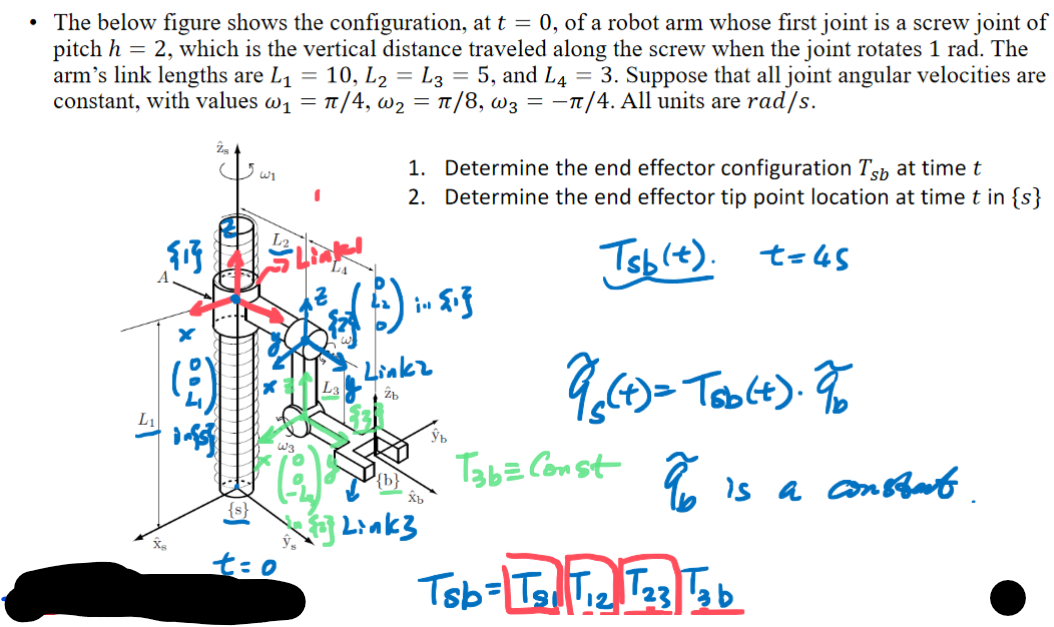
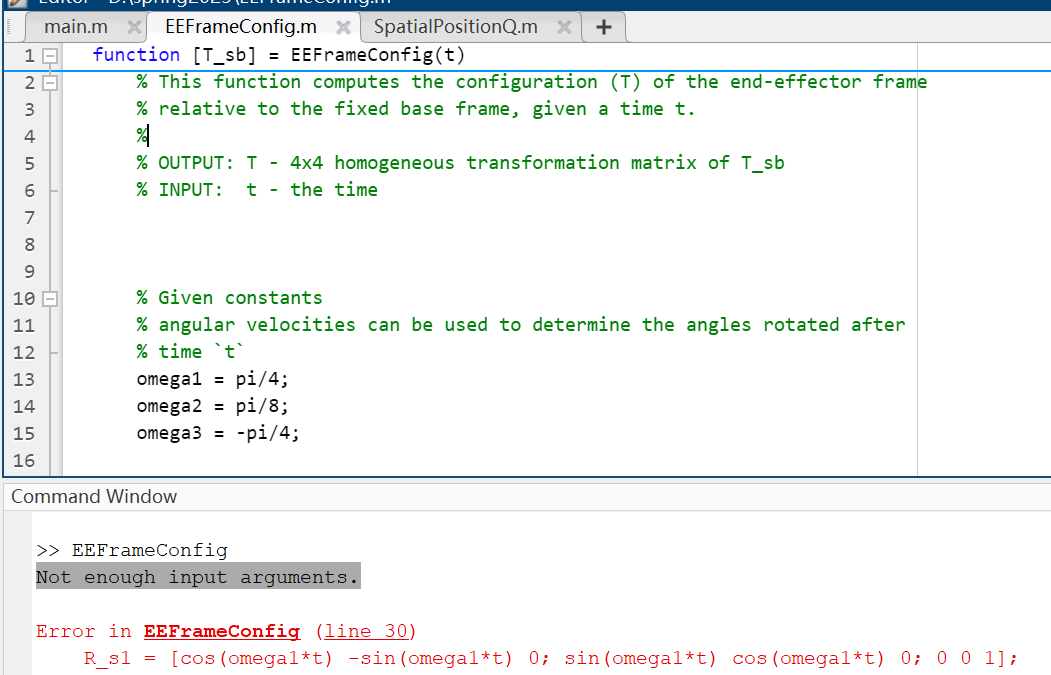
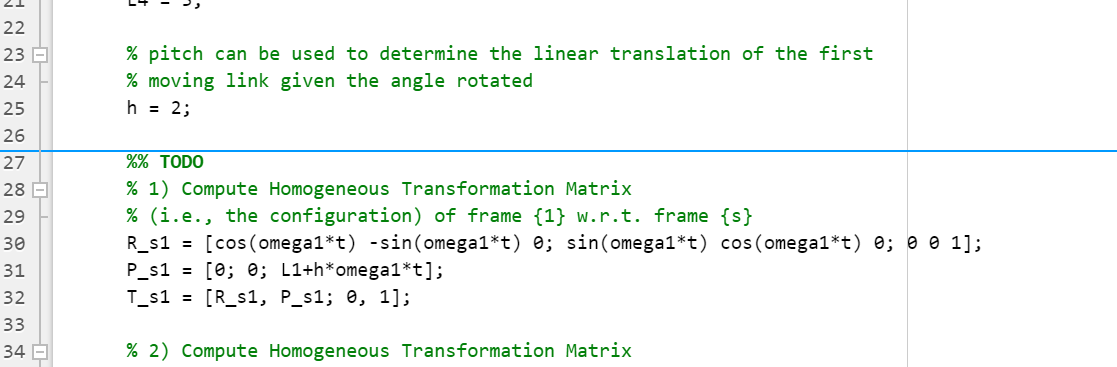
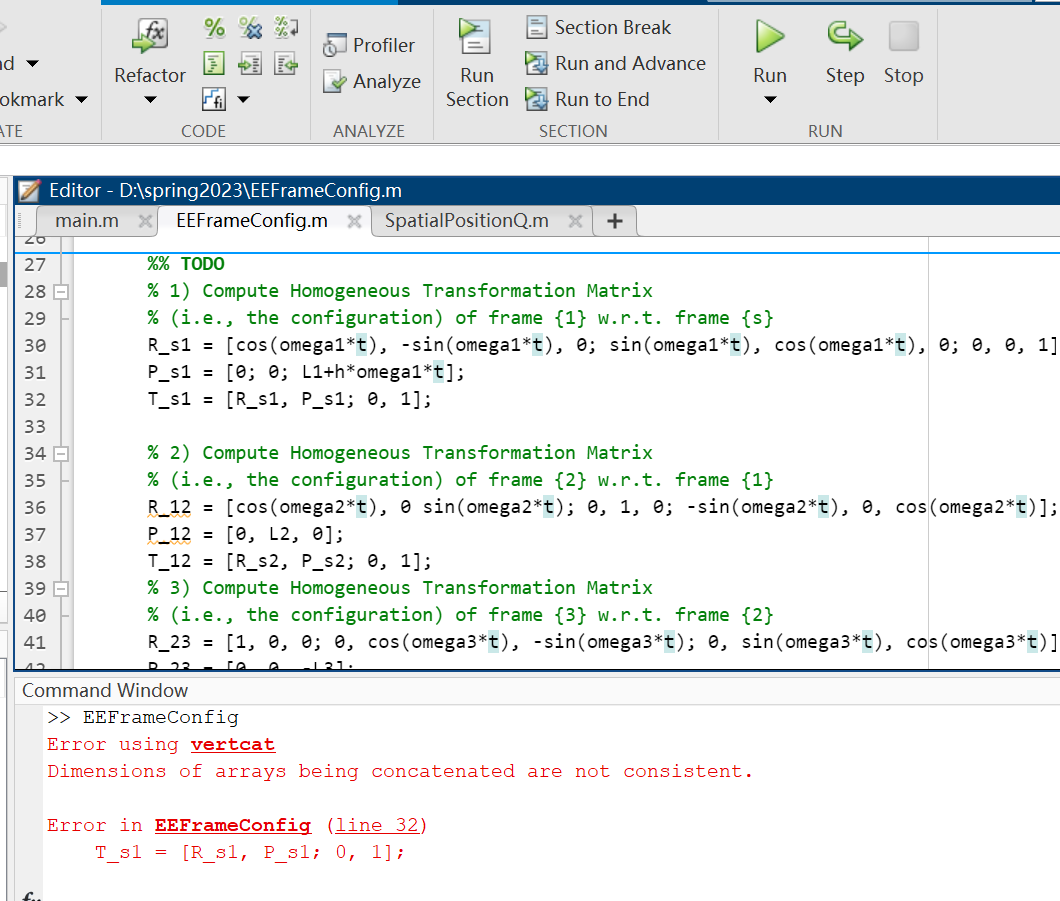
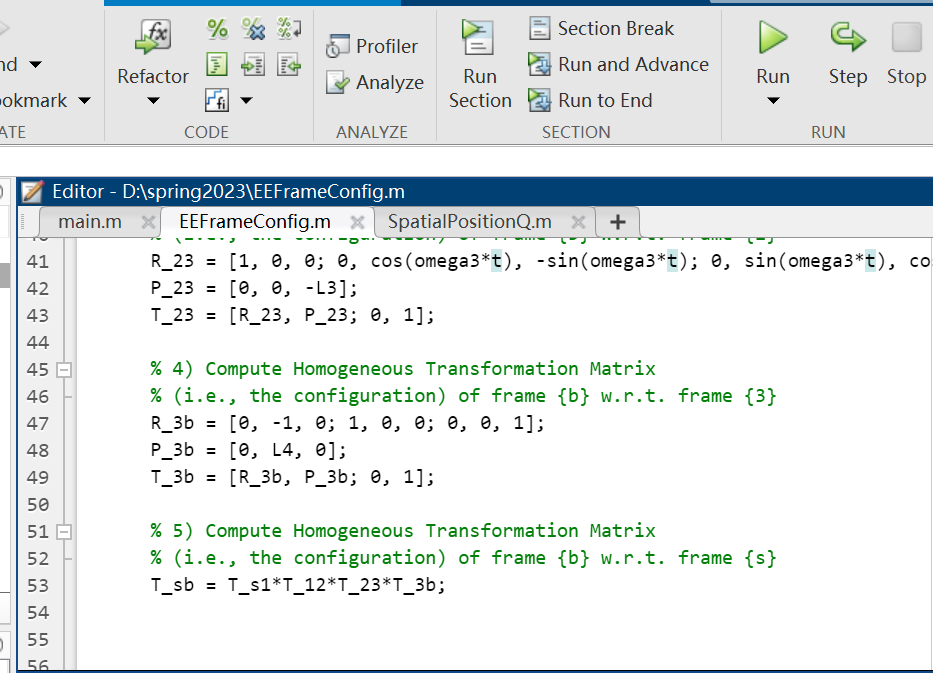
Need some help with TODO part matlab code. Can't fix the error. The below figure shows the configuration, at t=0, of a robot arm whose
Need some help with TODO part matlab code. Can't fix the error.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
MongoDB 4 Quick Start Guide Learn The Skills You Need To Work With The World S Most Popular NoSQL Database
Authors: Doug Bierer
1st Edition
1789343534, 978-1789343533