

Question: Observability and Controllability of a linear time invariant system Problem 4: Consider the following linear time invariant system: 1 1 0 0 x: 1 1
Observability and Controllability of a linear time invariant system
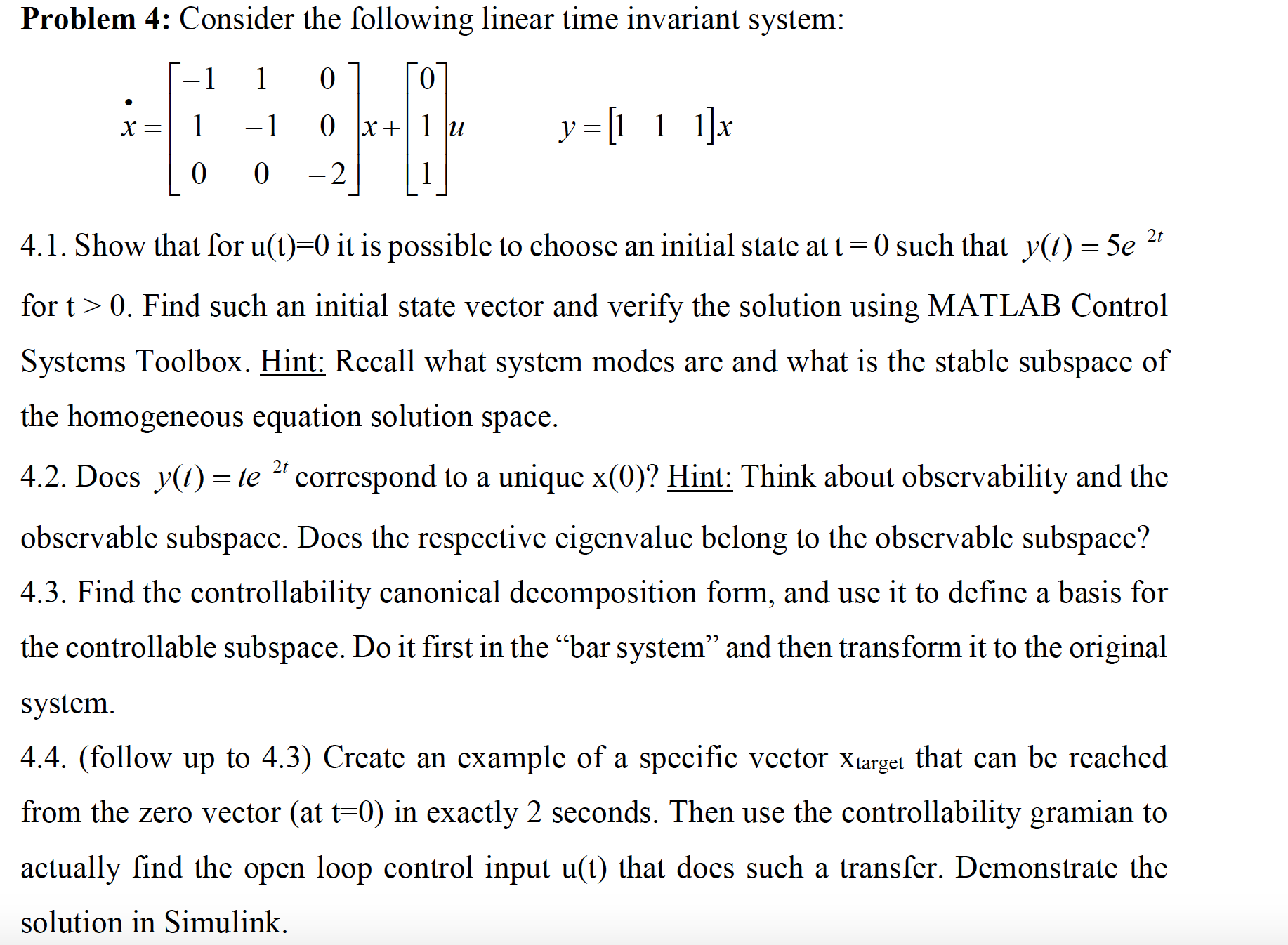
Problem 4: Consider the following linear time invariant system: 1 1 0 0 x: 1 1 0 x+lu y=[1 1 l]x 0 0 2 1 4.1. Show that for u(t)=0 it is possible to choose an initial state at t = 0 such that y(t) : 5e'2' for t > 0. Find such an initial state vector and verify the solution using MATLAB Control Systems Toolbox. Hint: Recall What system modes are and what is the stable subspace of the homogeneous equation solution space. 4.2. Does y(t) = te'\" correspond to a unique x(0)? Hint: Think about observability and the observable subspace. Does the respective eigenvalue belong to the observable subspace? 4.3. Find the controllability canonical decomposition form, and use it to dene a basis for the controllable subspace. Do it rst in the \"bar system\" and then trans form it to the original system. 4.4. (follow up to 4.3) Create an example of a specic vector Xtarget that can be reached from the zero vector (at t=0) in exactly 2 seconds. Then use the controllability gramian to actually nd the open loop control input u(t) that does such a transfer. Demonstrate the solution in Simulink
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts