

Question
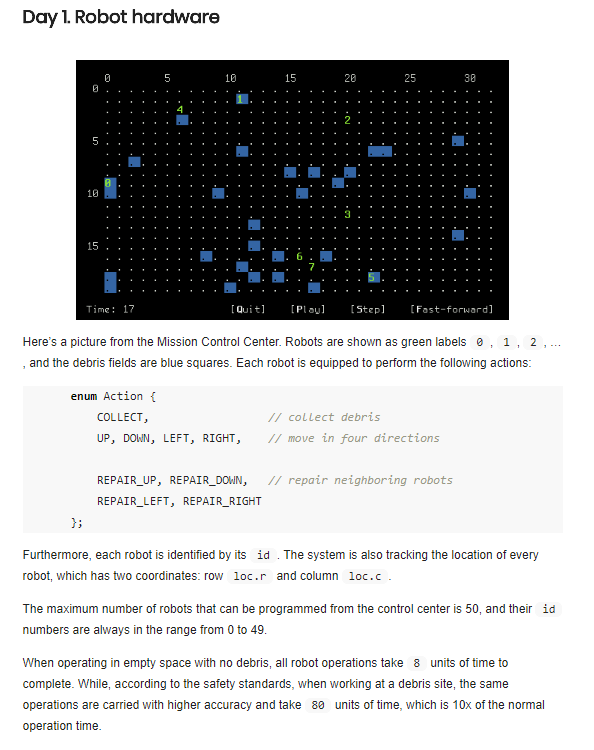
Okay, so below is the prompt, we are supposed to make the bots move and scan as efficiently as possible. I need help getting these
Okay, so below is the prompt, we are supposed to make the bots move and scan as efficiently as possible. I need help getting these robots to move efficiently and efficiently fix the robots when they malfunction.
#include
#include
#include "bot.h"
using namespace std;
const int MAX_ROBOT_NUM = 50;
int NUM; // to remember number or robots
int ROWS, COLS; // map dimensions
/* Initialization procedure, called when the game starts: */
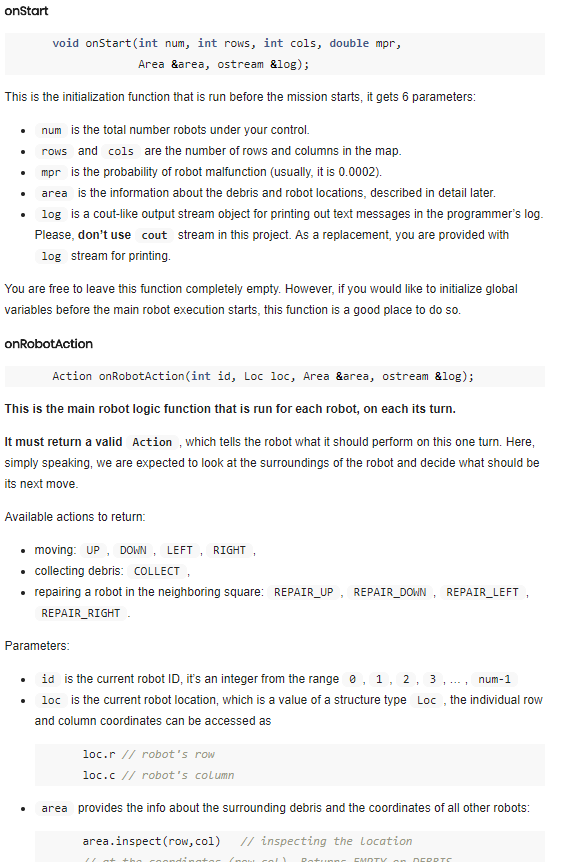
void onStart(int num, int rows, int cols, double mpr,
Area &area, ostream &log)
{
NUM = num; // save the number of robots and the map dimensions
ROWS = rows;
COLS = cols;
log
}
/* Deciding robot's next move */
Action onRobotAction(int id, Loc loc, Area &area, ostream &log) {
int row = loc.r; // current row and column
int col = loc.c;
if (area.inspect(row, col) == DEBRIS)
return COLLECT;
else {
// if not at a debris field, move randomly:
switch(rand() % 4) {
case 0:
return LEFT;
case 1:
return RIGHT;
case 2:
return UP;
default:
return DOWN;
}
}
}
void onRobotMalfunction(int id, Loc loc, Area &area, ostream &log) {
log
}
void onClockTick(int time, ostream &log) {
if (time % 100 == 0) log
}
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Oracle Databases On The Web Learn To Create Web Pages That Interface With Database Engines
Authors: Robert Papaj, Donald Burleson
11th Edition
1576100995, 978-1576100998