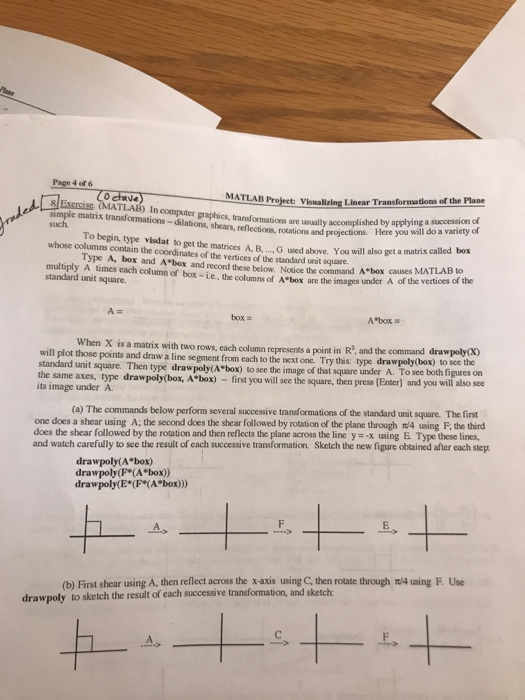
Page 4 of 6 MATLAB Project: Visualizing Linear Transforma of the Plane Exercise (MATLAB) In computer graphics, transformations are usually simple matrix transformations- dilations, shears, reflections, rotations such ormations are usually accomplished by applying a succession of and projections. Here you will do a variety of To begin, type visdat to get the matrices A B..G used above. You will also get a matrix called box Type A, box and A"box and record these below. Notice the command A box causes MATIo whose columns contain the coordinates of the vertices of the standard unit square. multiply A times each column of box-i.e, the columns of A"box are the images under A of the vertices standard unit square. A : A*box When X is a matrix with two rows, each column represents a point in R', and the command drawpoly(X) box) to see the will plot those points and draw a line segment from each to the next onc. Try this: type drawpoly standard unit square. Then type drawpoly(A"box) to see the image of that square under A. To see both figures the same axes, type drawpoly(box, A box) - first you will see the square, then press (Enter) and you its image under A. (a) The commands below perform several successive transformations of the standard unit square. The first one does a shear using A: the second does the shear followed by rotation of the plane through 4 using F, the third does the shear followed by the rotation and then reflects the plane across the line y-x using E Type these lines, and watch carefully to see the result of each successive transformation. Sketch the new figure obtained after each step drawpoly(A box) drawpoly (F"(Abox)) drawpoly(E (F (A box) Use (b) First shear using A, then reflect across the x-axis usingC, then rotate through 14 using F drawpoly to sketch the result of each successive transformation, and sketch Page 4 of 6 MATLAB Project: Visualizing Linear Transforma of the Plane Exercise (MATLAB) In computer graphics, transformations are usually simple matrix transformations- dilations, shears, reflections, rotations such ormations are usually accomplished by applying a succession of and projections. Here you will do a variety of To begin, type visdat to get the matrices A B..G used above. You will also get a matrix called box Type A, box and A"box and record these below. Notice the command A box causes MATIo whose columns contain the coordinates of the vertices of the standard unit square. multiply A times each column of box-i.e, the columns of A"box are the images under A of the vertices standard unit square. A : A*box When X is a matrix with two rows, each column represents a point in R', and the command drawpoly(X) box) to see the will plot those points and draw a line segment from each to the next onc. Try this: type drawpoly standard unit square. Then type drawpoly(A"box) to see the image of that square under A. To see both figures the same axes, type drawpoly(box, A box) - first you will see the square, then press (Enter) and you its image under A. (a) The commands below perform several successive transformations of the standard unit square. The first one does a shear using A: the second does the shear followed by rotation of the plane through 4 using F, the third does the shear followed by the rotation and then reflects the plane across the line y-x using E Type these lines, and watch carefully to see the result of each successive transformation. Sketch the new figure obtained after each step drawpoly(A box) drawpoly (F"(Abox)) drawpoly(E (F (A box) Use (b) First shear using A, then reflect across the x-axis usingC, then rotate through 14 using F drawpoly to sketch the result of each successive transformation, and sketch