

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
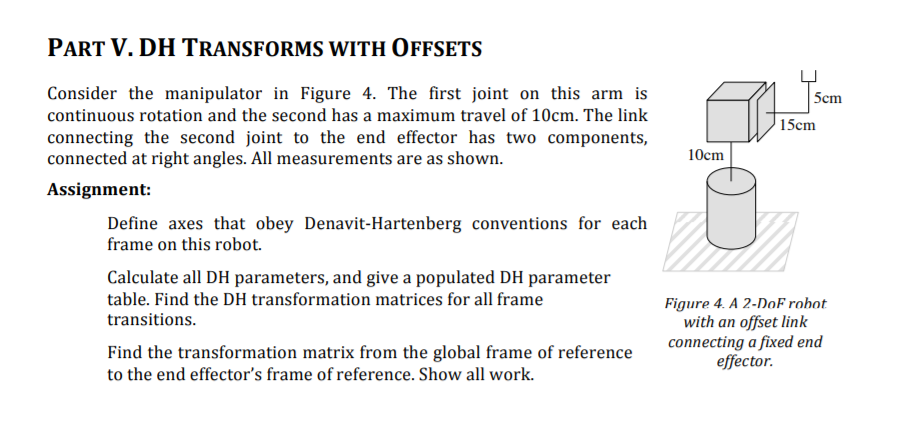
PART V. DH TrANSFORMS WITH OFFSETS Consider the manipulator in Figure 4. The first joint on this arm is continuous rotation and the second has
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Fundamentals Of Database Management Systems
Authors: Mark L. Gillenson
2nd Edition
0470624701, 978-0470624708