

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
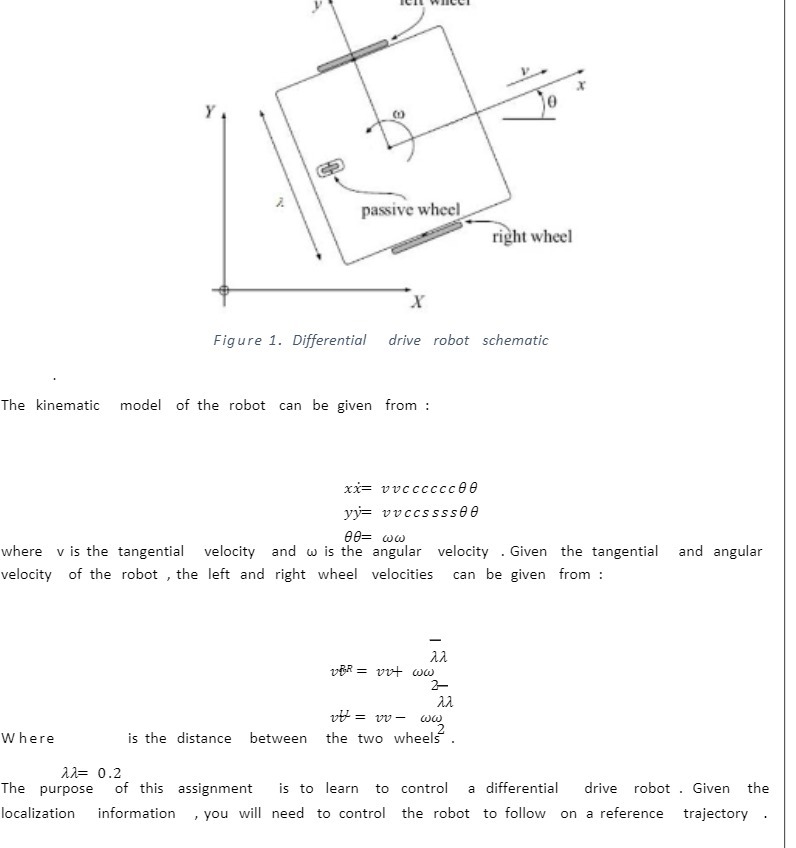
passive wheel right wheel Figure 1. Differential drive robot schematic The kinematic model of the robot can be given from : xx= vuccccccee vy= vvcessssee
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Fundamentals of Physics
Authors: Jearl Walker, Halliday Resnick
9th Edition
470469080, 470556536, 470469110, 9780470469088, 9780470556535, 978-0470469118