

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
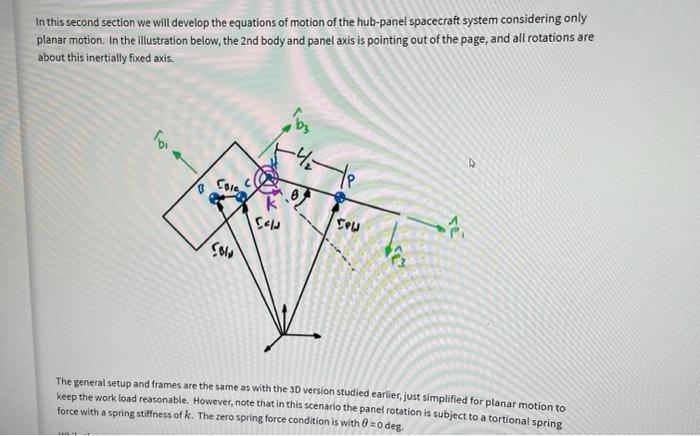
please help me In this second section we will develop the equations of motion of the hub-panel spacecraft system considering only planar motion. In the
please help me
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Database Processing Fundamentals, Design, and Implementation
Authors: David M. Kroenke, David J. Auer
14th edition
133876705, 9781292107639, 1292107634, 978-0133876703