

Question: please help,if you do this i will give give a like System-1: The Cartesian robot given in Figure-1 is supposed to be used for drawing
 please help,if you do this i will give give a like
please help,if you do this i will give give a like
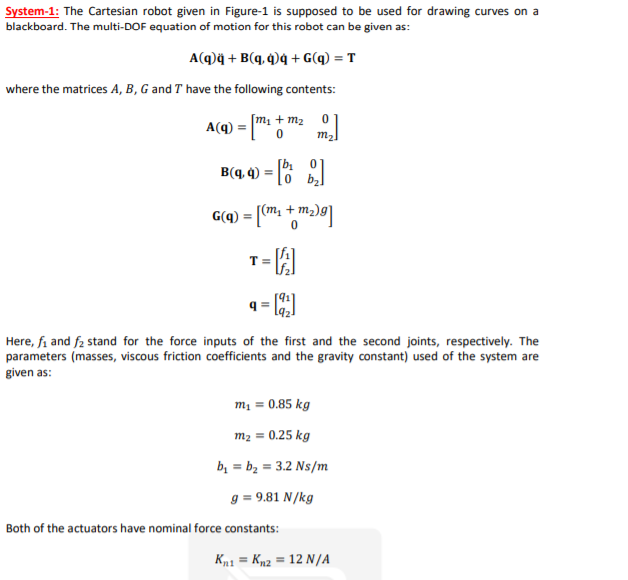
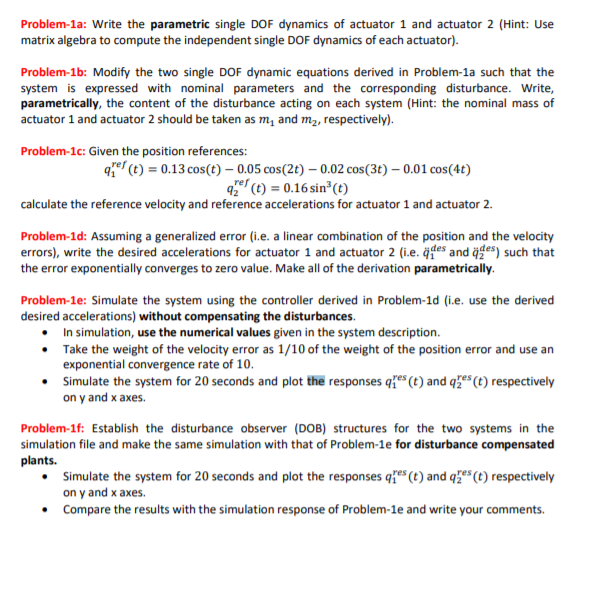
System-1: The Cartesian robot given in Figure-1 is supposed to be used for drawing curves on a blackboard. The multi-DOF equation of motion for this robot can be given as: A(qq +B(9,94 +G(q) = T where the matrices A, B, G and T have the following contents: [m + m2 A(9) n] 0 m2 B(4,4) = [] G(q) = [(m + m2)9] =) TE Here, fi and f2 stand for the force inputs of the first and the second joints, respectively. The parameters (masses, viscous friction coefficients and the gravity constant) used of the system are given as: m = 0.85 kg 12 = 0.25 kg b = b2 = 3.2 Ns/m g = 9.81 N/kg Both of the actuators have nominal force constants: Km1 = Kn2 = 12 N/A Problem-la: Write the parametric single DOF dynamics of actuator 1 and actuator 2 (Hint: Use matrix algebra to compute the independent single DOF dynamics of each actuator). Problem-1b: Modify the two single DOF dynamic equations derived in Problem-la such that the system is expressed with nominal parameters and the corresponding disturbance. Write, parametrically, the content of the disturbance acting on each system (Hint: the nominal mass of actuator 1 and actuator 2 should be taken as me and m2, respectively). Problem-1c: Given the position references: 976' (t) = 0.13 cos(t) - 0.05 cos(2t) - 0.02 cos(3t) - 0.01 cos(4t) quae(t) = 0.16 sin(t) calculate the reference velocity and reference accelerations for actuator 1 and actuator 2. Problem-1d: Assuming a generalized error (i.e. a linear combination of the position and the velocity errors), write the desired accelerations for actuator 1 and actuator 2 (i.e.ades and ages) such that the error exponentially converges to zero value. Make all of the derivation parametrically. Problem-le: Simulate the system using the controller derived in Problem-1d (i.e. use the derived desired accelerations) without compensating the disturbances. In simulation, use the numerical values given in the system description. Take the weight of the velocity error as 1/10 of the weight of the position error and use an exponential convergence rate of 10. Simulate the system for 20 seconds and plot the responses qres (t) and q2es (t) respectively on y and x axes. Problem-1f: Establish the disturbance observer (DOB) structures for the two systems in the simulation file and make the same simulation with that of Problem-le for disturbance compensated plants. Simulate the system for 20 seconds and plot the responses qles (t) and qes (t) respectively on y and x axes. Compare the results with the simulation response of Problem-le and write your comments. System-1: The Cartesian robot given in Figure-1 is supposed to be used for drawing curves on a blackboard. The multi-DOF equation of motion for this robot can be given as: A(qq +B(9,94 +G(q) = T where the matrices A, B, G and T have the following contents: [m + m2 A(9) n] 0 m2 B(4,4) = [] G(q) = [(m + m2)9] =) TE Here, fi and f2 stand for the force inputs of the first and the second joints, respectively. The parameters (masses, viscous friction coefficients and the gravity constant) used of the system are given as: m = 0.85 kg 12 = 0.25 kg b = b2 = 3.2 Ns/m g = 9.81 N/kg Both of the actuators have nominal force constants: Km1 = Kn2 = 12 N/A Problem-la: Write the parametric single DOF dynamics of actuator 1 and actuator 2 (Hint: Use matrix algebra to compute the independent single DOF dynamics of each actuator). Problem-1b: Modify the two single DOF dynamic equations derived in Problem-la such that the system is expressed with nominal parameters and the corresponding disturbance. Write, parametrically, the content of the disturbance acting on each system (Hint: the nominal mass of actuator 1 and actuator 2 should be taken as me and m2, respectively). Problem-1c: Given the position references: 976' (t) = 0.13 cos(t) - 0.05 cos(2t) - 0.02 cos(3t) - 0.01 cos(4t) quae(t) = 0.16 sin(t) calculate the reference velocity and reference accelerations for actuator 1 and actuator 2. Problem-1d: Assuming a generalized error (i.e. a linear combination of the position and the velocity errors), write the desired accelerations for actuator 1 and actuator 2 (i.e.ades and ages) such that the error exponentially converges to zero value. Make all of the derivation parametrically. Problem-le: Simulate the system using the controller derived in Problem-1d (i.e. use the derived desired accelerations) without compensating the disturbances. In simulation, use the numerical values given in the system description. Take the weight of the velocity error as 1/10 of the weight of the position error and use an exponential convergence rate of 10. Simulate the system for 20 seconds and plot the responses qres (t) and q2es (t) respectively on y and x axes. Problem-1f: Establish the disturbance observer (DOB) structures for the two systems in the simulation file and make the same simulation with that of Problem-le for disturbance compensated plants. Simulate the system for 20 seconds and plot the responses qles (t) and qes (t) respectively on y and x axes. Compare the results with the simulation response of Problem-le and write your comments
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts