

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Please write a paragraph. Exercise 13.32 Wheel-based odometry can be supplemented by odometry based on an inertial measurement unit (IMU). A typical IMU includes a
Please write a paragraph.
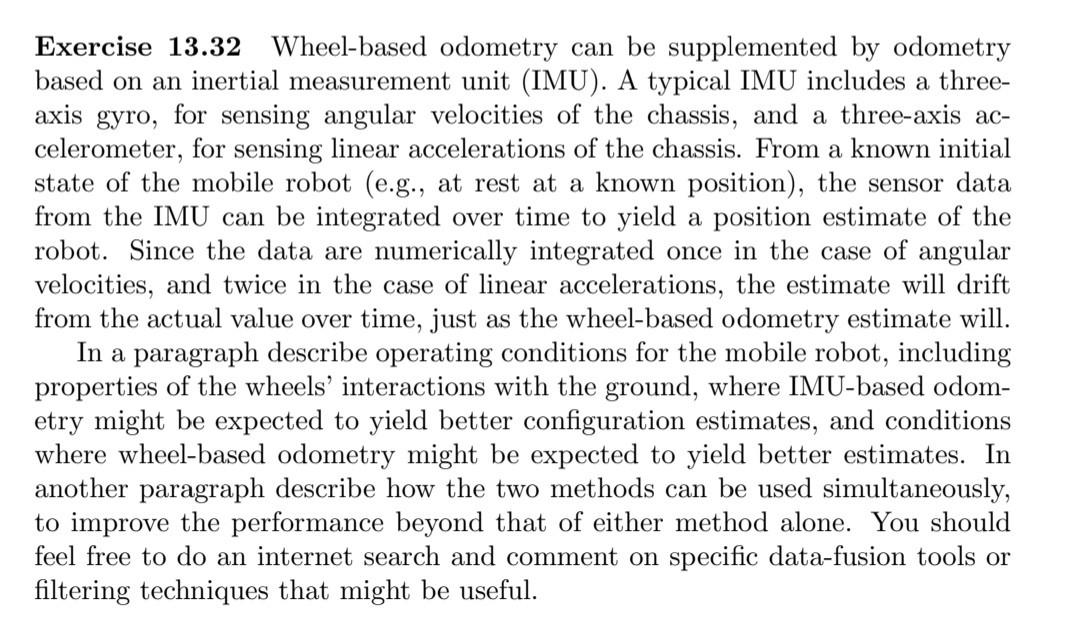
Exercise 13.32 Wheel-based odometry can be supplemented by odometry based on an inertial measurement unit (IMU). A typical IMU includes a threeaxis gyro, for sensing angular velocities of the chassis, and a three-axis accelerometer, for sensing linear accelerations of the chassis. From a known initial state of the mobile robot (e.g., at rest at a known position), the sensor data from the IMU can be integrated over time to yield a position estimate of the robot. Since the data are numerically integrated once in the case of angular velocities, and twice in the case of linear accelerations, the estimate will drift from the actual value over time, just as the wheel-based odometry estimate will. In a paragraph describe operating conditions for the mobile robot, including properties of the wheels' interactions with the ground, where IMU-based odometry might be expected to yield better configuration estimates, and conditions where wheel-based odometry might be expected to yield better estimates. In another paragraph describe how the two methods can be used simultaneously, to improve the performance beyond that of either method alone. You should feel free to do an internet search and comment on specific data-fusion tools or filtering techniques that might be usefulStep by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
A Beginners Guide To Google Drive And Docs Step By Step Practical Instructions To Google Drive Docs Sheets And Forms
Authors: Robert William
1st Edition
B085K8N4LN, 979-8615386251