

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Please write/type clearly and provide explanations! Thanks. 1 Extended Kalman Filter - Linearization The motion model for a differential drive considered in the example discussed
Please write/type clearly and provide explanations! Thanks.
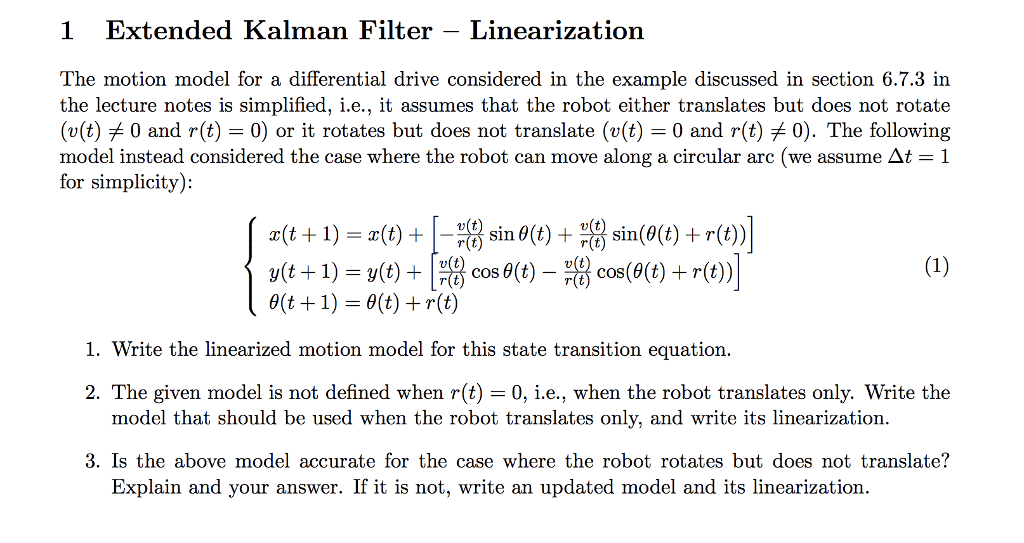
1 Extended Kalman Filter - Linearization The motion model for a differential drive considered in the example discussed in section 6.7.3 in the lecture notes is simplified, i.e., it assumes that the robot either translates but does not rotate (v(t)?0 and r(t) 0) or it rotates but does not translate (v(t) 0 and r(t)?0). The following model instead considered the case where the robot can move along a circular arc (we assume ?t-1 for simplicity) x(t + 1)-z(t) + ye+ 1) y(t) sin ?(t) + cos ?(t) } sin(?(t) + r(t))] cos(?(t) r(t)) 1. Write the linearized motion model for this state transition equation 2. The given model is not defined when r(t.e., when the robot translates only. Write the model that should be used when the robot translates only, and write its linearization 3. Is the above model accurate for the case where the robot rotates but does not translate? Explain and your answer. If it is not, write an updated model and its linearization. 1 Extended Kalman Filter - Linearization The motion model for a differential drive considered in the example discussed in section 6.7.3 in the lecture notes is simplified, i.e., it assumes that the robot either translates but does not rotate (v(t)?0 and r(t) 0) or it rotates but does not translate (v(t) 0 and r(t)?0). The following model instead considered the case where the robot can move along a circular arc (we assume ?t-1 for simplicity) x(t + 1)-z(t) + ye+ 1) y(t) sin ?(t) + cos ?(t) } sin(?(t) + r(t))] cos(?(t) r(t)) 1. Write the linearized motion model for this state transition equation 2. The given model is not defined when r(t.e., when the robot translates only. Write the model that should be used when the robot translates only, and write its linearization 3. Is the above model accurate for the case where the robot rotates but does not translate? Explain and your answer. If it is not, write an updated model and its linearizationStep by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Database Security
Authors: Alfred Basta, Melissa Zgola
1st Edition
1435453905, 978-1435453906