

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
PLS HELP ME :( Even if you don't do it completely, it is very valuable to bring it up to a point.This is very important
PLS HELP ME :( Even if you don't do it completely, it is very valuable to bring it up to a point.This is very important for me :(
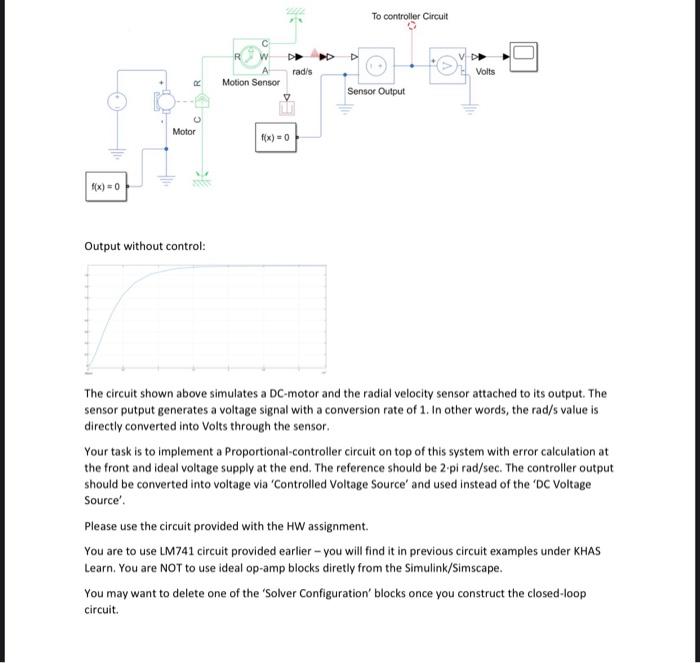
You are required to use a high enough gain to force the rotation rate to converge the reference; however, the upper limit of LM741 will not allow that. Thus, let's reduce the reference from 2*pi rad/s to 2*pi/10 rad/s. The output might still be saturated depending on the gain you use, but the circuit will work with the given Vcc and Vee.
This is a pure Simulink assignment. You are NOT to use codes.
Note that there are two solver configuration blocks in the initial design as the system is not closed-loop yet. Once the system is complete, you may want to delete one of the said blocks IF an error occurs.
You are to use the LM741 om-amp block for this assignment.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Winning Your Audit
Authors: Holmes F. Crouch
1st Edition
0945339151, 978-0945339151