

Question
Let us consider a two-link robotic device as a double pendulum undergoing 2-D motion in a gravity field g. The coordinates 1 and
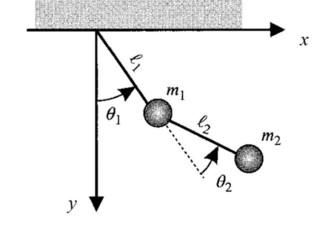
Let us consider a two-link robotic device as a double pendulum undergoing 2-D motion in a gravity field g. The coordinates θ1 and θ2 describe the orientation of the bars, with θ1 and θ2 being positive for counterclockwise rotations from vertical. Use Lagrange's method to find the EOM's of the system using the generalized coordinates of θ1 and θ2.
In this problem, you might need to use the following formula to simplify the calculation:
cos(α-β) = sin α sin β+ cos α cos β
Problem 1a) Based on the configuration of the system, determine the number of the degree-of-freedom (DOF).
Problem 1b) The origin of this robotic system is set to be located at the top-left point. The coordinate of the x- and y-directions are shown as the figure. What are the generalized kinematic equations of m1 and m2?
Problem 1c) To synthesize the dynamic equations using Lagrange's method, which of the following equation needs to be used before the partial differential process? Select all that applies.
Problem 1d) What is the kinetic energy of the system based on your kinematic equations?
Problem 1e) What is the potential energy of such a system?
Problem 1f) Which of the following operation is a required procedure to derive the dynamic equation of the ith component by using Lagrange's method?
Problem 1g) Based on the problem statement, what are the external force applied to the masses m1 and m2, individually? Fill in the blanks.
Problem 1h) Based on the setup of this system, how many dynamic equations should be derived for this robotic system?
Problem 1i) What is the work created by external forces?
Problem 1j) Which of the following equations are the dynamic equations of this robotic system based on the derivation from 1(a) to 1(i)? Check all that applies.
0 m 02 11 2 r
Step by Step Solution
3.57 Rating (157 Votes )
There are 3 Steps involved in it
Step: 1
Problem 1a The system has two links that can rotate around their respective joints so there are two degrees of freedom DOF in this system Problem 1b T...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Modern Control Systems
Authors: Richard C. Dorf, Robert H. Bishop
12th edition
136024580, 978-0136024583