

Problem 2. Based on a previous midterm exam problem. This problem asks you to analyze the effect of using a bumpless feedback control implementation
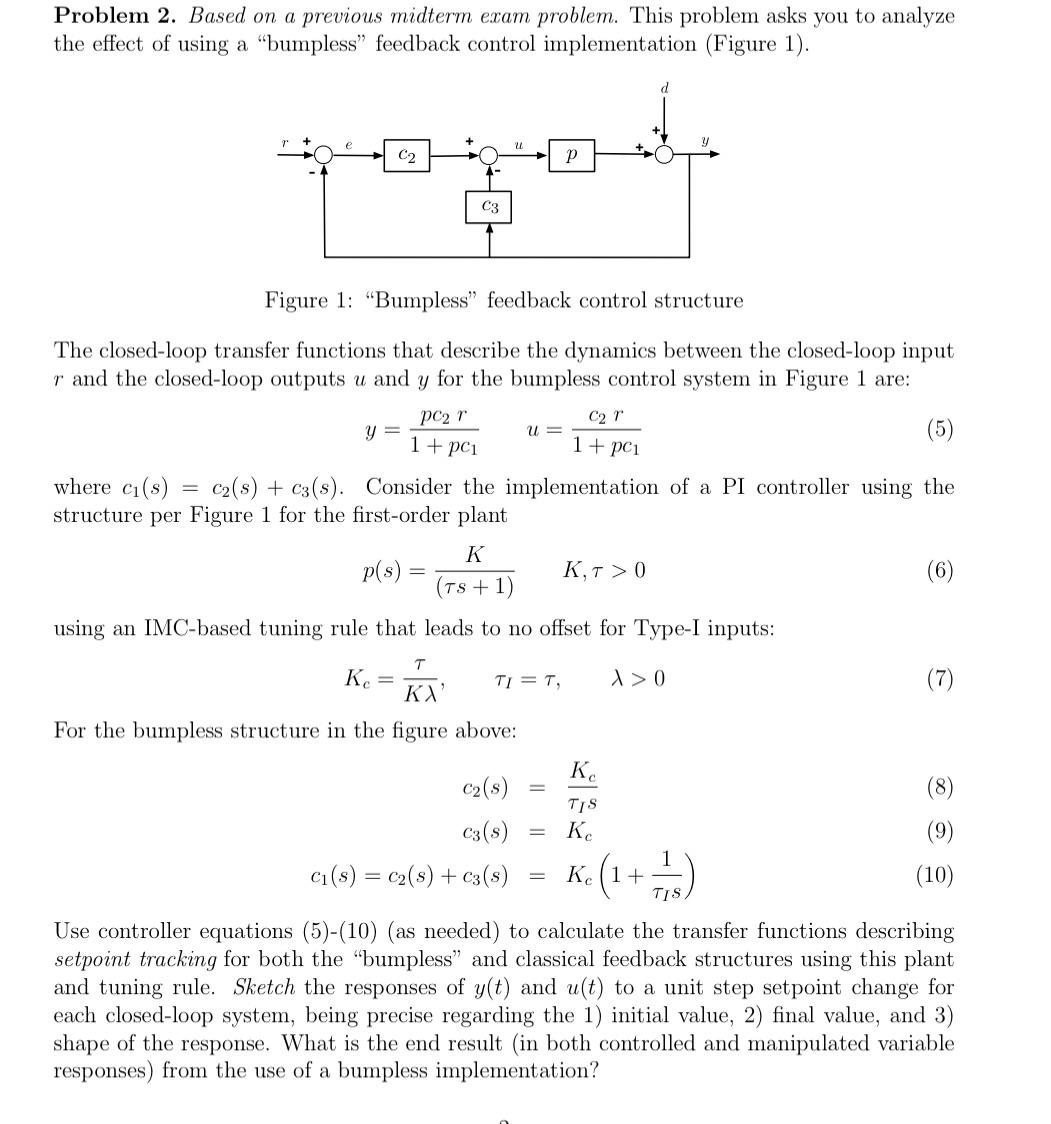
Problem 2. Based on a previous midterm exam problem. This problem asks you to analyze the effect of using a "bumpless" feedback control implementation (Figure 1). C2 + A- C3 Figure 1: "Bumpless" feedback control structure The closed-loop transfer functions that describe the dynamics between the closed-loop input r and the closed-loop outputs u and y for the bumpless control system in Figure 1 are: y = pc2 r 1+pc1 u = C2 T 1+pc1 (5) where c(s) = C2(s) C3(s). Consider the implementation of a PI controller using the structure per Figure 1 for the first-order plant K p(s) = K, TO (TS+1) using an IMC-based tuning rule that leads to no offset for Type-I inputs: T = TI = T, A> O KX' For the bumpless structure in the figure above: C2(8) C3(8) = TIS = C1(s) = c2(s) + C3(s) = Ke 1+ TIS (6) (7) (8) (9) (10) Use controller equations (5)-(10) (as needed) to calculate the transfer functions describing setpoint tracking for both the "bumpless" and classical feedback structures using this plant and tuning rule. Sketch the responses of y(t) and u(t) to a unit step setpoint change for each closed-loop system, being precise regarding the 1) initial value, 2) final value, and 3) shape of the response. What is the end result (in both controlled and manipulated variable responses) from the use of a bumpless implementation?
Step by Step Solution
There are 3 Steps involved in it
Step: 1

See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Authors: Allen R. Angel, Christine D. Abbott, Dennis Runde
11th Edition
0135740460, 978-0135740460