

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Problem 2. Control law partitioning. See Lecture 3 and 4 notes on Control Law Partitioning. 0 Above is a simple robot arm, to be
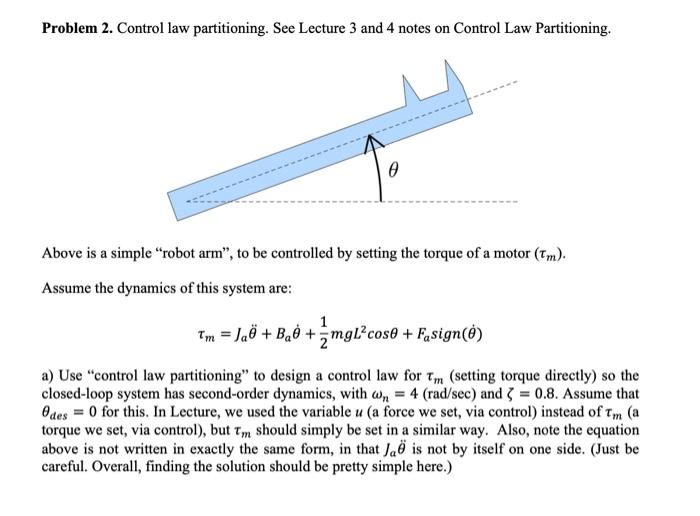
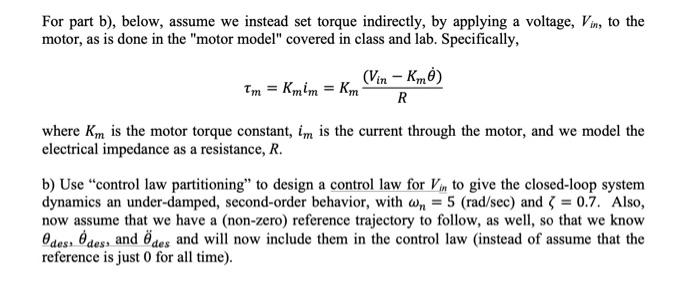
Problem 2. Control law partitioning. See Lecture 3 and 4 notes on Control Law Partitioning. 0 Above is a simple "robot arm", to be controlled by setting the torque of a motor (Tm). Assume the dynamics of this system are: 1 Tm = Jao + B0 + mgl cose + Fsign(0) a) Use "control law partitioning" to design a control law for Tm (setting torque directly) so the closed-loop system has second-order dynamics, with w,, = 4 (rad/sec) and 3 = 0.8. Assume that Odes 0 for this. In Lecture, we used the variable u (a force we set, via control) instead of T, (a torque we set, via control), but Tm should simply be set in a similar way. Also, note the equation above is not written in exactly the same form, in that Ja is not by itself on one side. (Just be careful. Overall, finding the solution should be pretty simple here.) For part b), below, assume we instead set torque indirectly, by applying a voltage, Vin, to the motor, as is done in the "motor model" covered in class and lab. Specifically, Tm = Kmim = Km (Vin - Km) R where Km is the motor torque constant, im is the current through the motor, and we model the electrical impedance as a resistance, R. b) Use "control law partitioning" to design a control law for Vin to give the closed-loop system dynamics an under-damped, second-order behavior, with wn = 5 (rad/sec) and 0.7. Also, now assume that we have a (non-zero) reference trajectory to follow, as well, so that we know Odes, des, and des and will now include them in the control law (instead of assume that the reference is just 0 for all time).
Step by Step Solution
★★★★★
3.40 Rating (147 Votes )
There are 3 Steps involved in it
Step: 1
To design a control law using control law partitioning for the given system well start with part a where we directly set the torque Tm Then well move ...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Process Dynamics And Control
Authors: Dale E. Seborg, Thomas F. Edgar, Duncan A. Mellichamp, Francis J. Doyle
4th Edition
1119385561, 1119385563, 9781119285953, 978-1119385561