

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
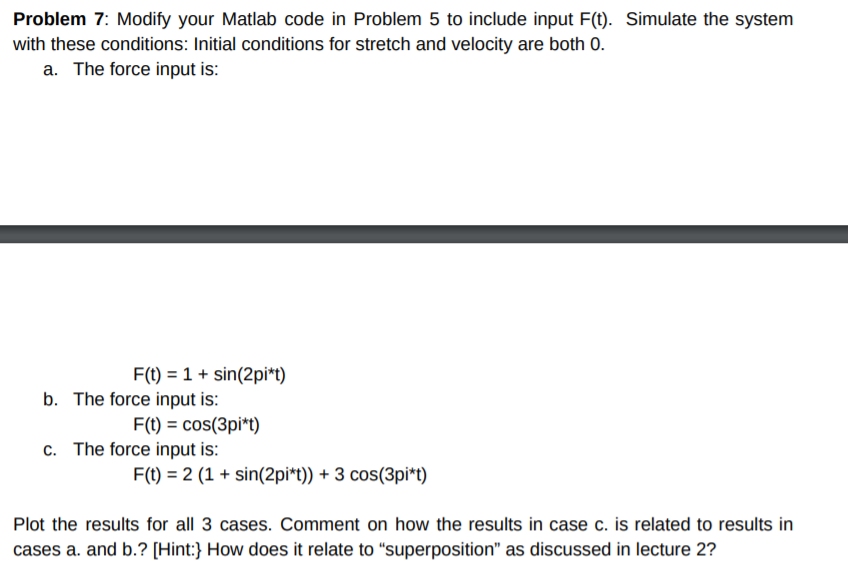
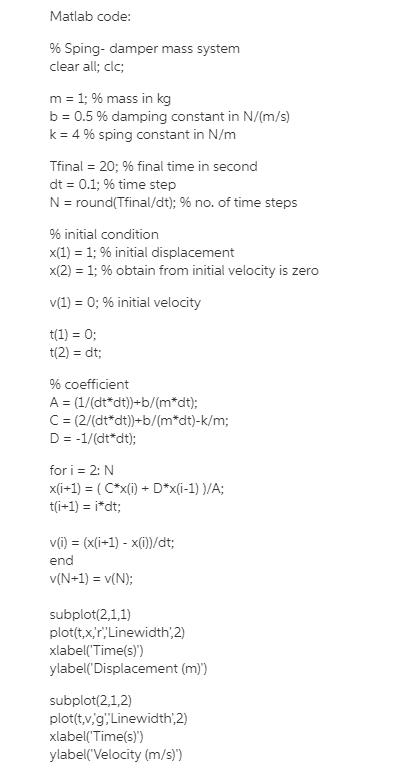
Problem 7: Modify your Matlab code in Problem 5 to include input F(t). Simulate the system with these conditions: Initial conditions for stretch and velocity
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Machine Learning And Knowledge Discovery In Databases European Conference Ecml Pkdd 2014 Nancy France September 15 19 2014 Proceedings Part I Lnai 8724
Authors: Toon Calders ,Floriana Esposito ,Eyke Hullermeier ,Rosa Meo
2014th Edition
3662448475, 978-3662448472