

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
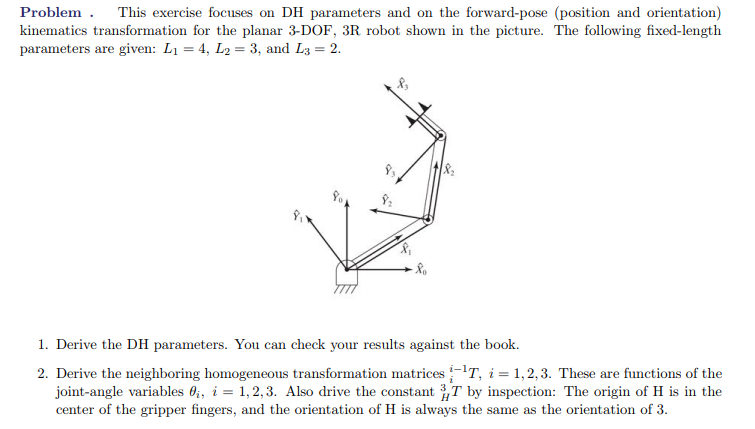
Problem . This exercise focuses on DH parameters and on the forward-pose (position and orientation) kinematics transformation for the planar 3-DOF, 3R robot shown in
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Relational Database Design With Microcomputer Applications
Authors: Glenn A. Jackson
1st Edition
0137718411, 978-0137718412