

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
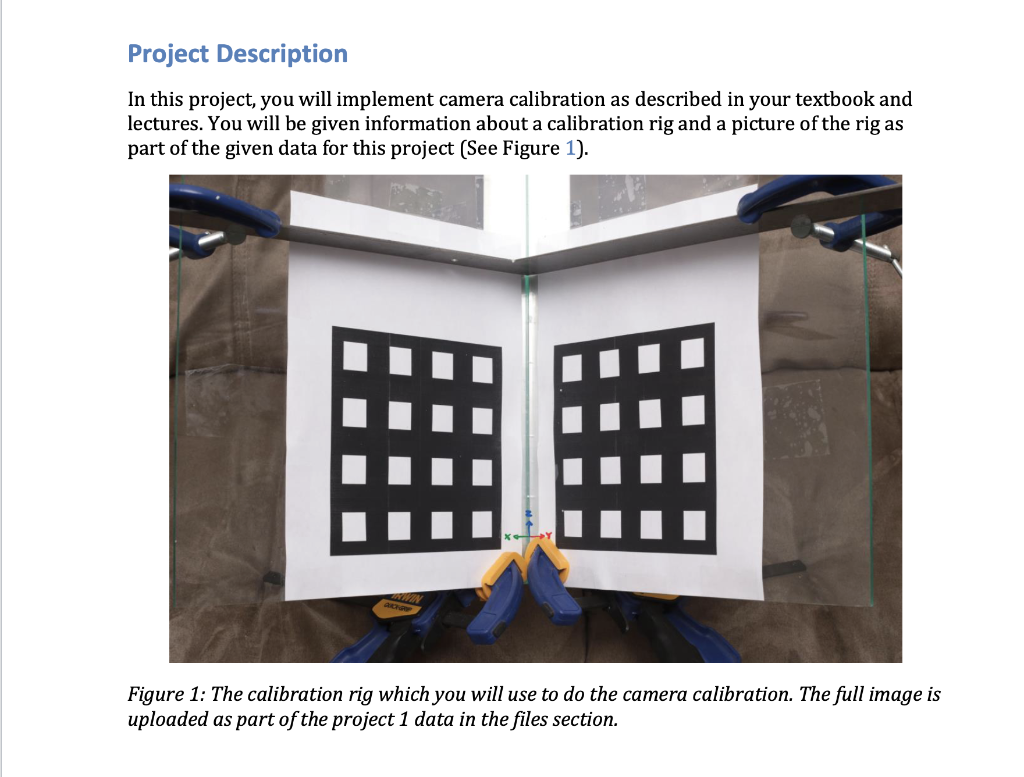
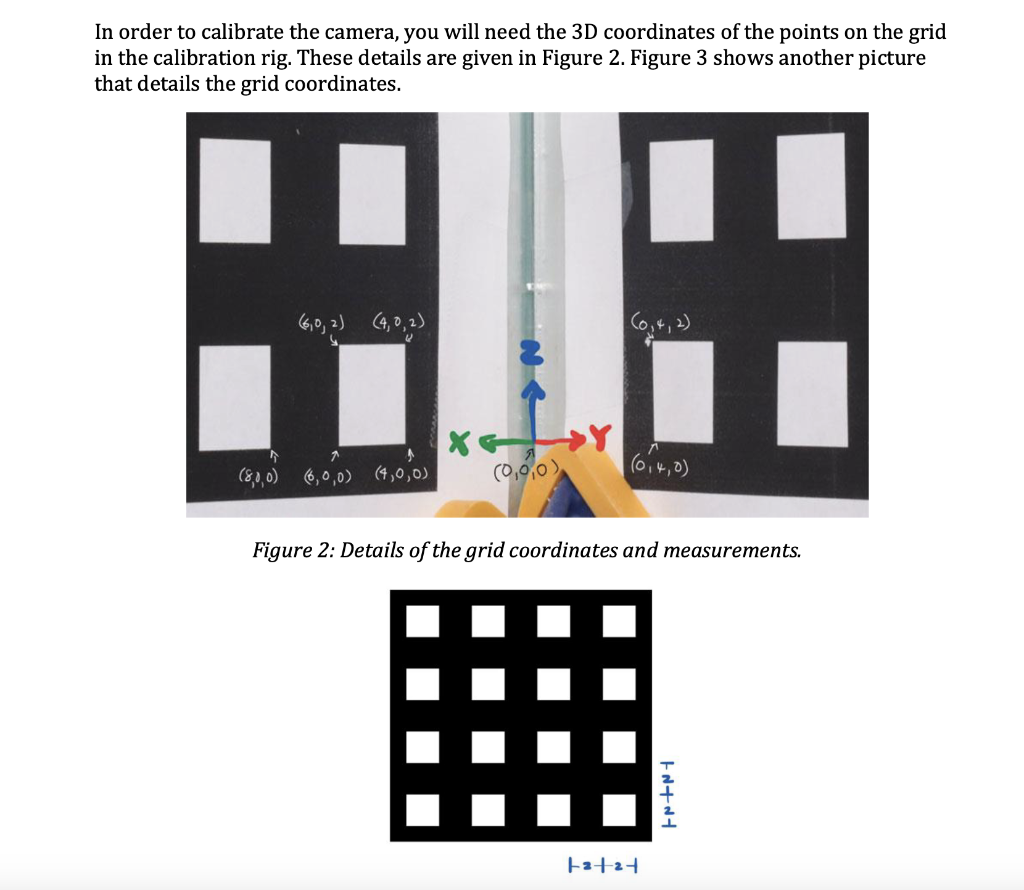
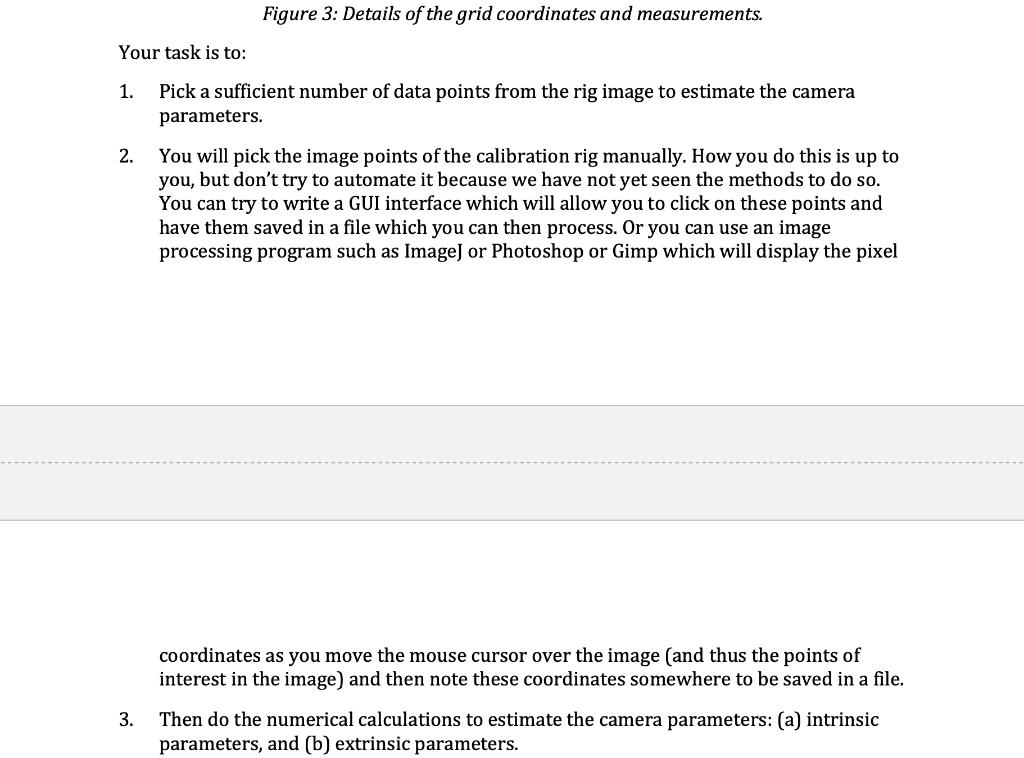
Project Description In this project, you will implement camera calibration as described in your textbook and lectures. You will be given information about a calibration
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Professional Microsoft SQL Server 2012 Administration
Authors: Adam Jorgensen, Steven Wort
1st Edition
1118106881, 9781118106884