

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
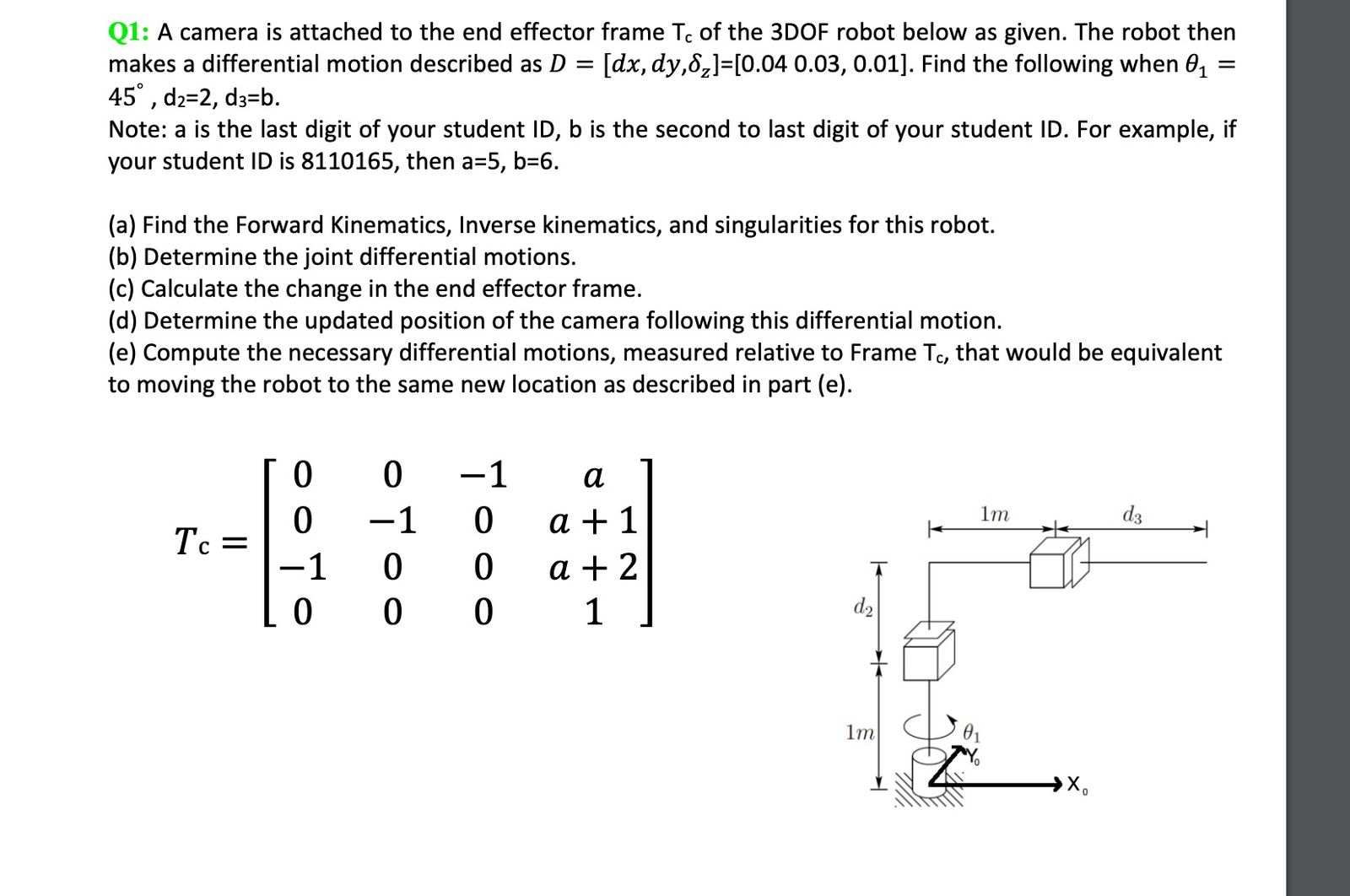
Q 1 : A camera is attached to the end effector frame T c of the 3 DOF robot below as given. The robot then
Q: A camera is attached to the end effector frame of the DOF robot below as given. The robot then
makes a differential motion described as Find the following when
Note: is the last digit of your student ID is the second to last digit of your student ID For example, if
your student ID is then
a Find the Forward Kinematics, Inverse kinematics, and singularities for this robot.
b Determine the joint differential motions.
c Calculate the change in the end effector frame.
d Determine the updated position of the camera following this differential motion.
e Compute the necessary differential motions, measured relative to Frame that would be equivalent
to moving the robot to the same new location as described in part e
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Fundamentals Of Hydraulic Engineering Systems
Authors: Robert J. Houghtalen, A. Osman H. Akan, Ned H. C. Hwang
4th Edition
136016383, 978-0136016380