

Question: Q4. Hidden Markov Models: Stationary Distribution (20 points) Consider the HMM shown below: (Xo E1 E2 The prior probability P(X), dynamics model P(X4+1 | Xt),
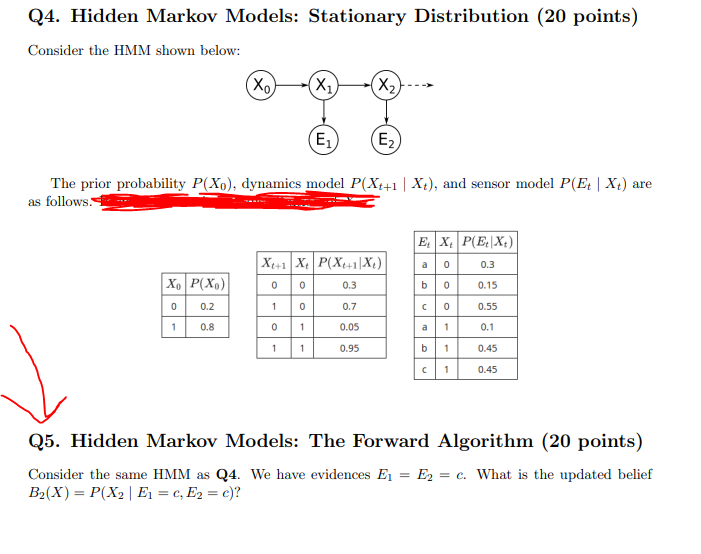
Q4. Hidden Markov Models: Stationary Distribution (20 points) Consider the HMM shown below: (Xo E1 E2 The prior probability P(X), dynamics model P(X4+1 | Xt), and sensor model P(Et | Xt) are as follows EX, P(EX) 0 0.3 Xc+1 X, P(X+1|X) 0 0 0.3 b 0 0.15 |X, P(x) 0 0.2 1 0 0.7 0 0.55 1 0.8 0 1 0.05 a 1 0.1 1 1 0.95 b 1 0.45 c 1 0.45 Q5. Hidden Markov Models: The Forward Algorithm (20 points) Consider the same HMM as Q4. We have evidences Ej = E2 = c. What is the updated belief B2(X) = P(X2 | Ep = c, E2 = c)? Q4. Hidden Markov Models: Stationary Distribution (20 points) Consider the HMM shown below: (Xo E1 E2 The prior probability P(X), dynamics model P(X4+1 | Xt), and sensor model P(Et | Xt) are as follows EX, P(EX) 0 0.3 Xc+1 X, P(X+1|X) 0 0 0.3 b 0 0.15 |X, P(x) 0 0.2 1 0 0.7 0 0.55 1 0.8 0 1 0.05 a 1 0.1 1 1 0.95 b 1 0.45 c 1 0.45 Q5. Hidden Markov Models: The Forward Algorithm (20 points) Consider the same HMM as Q4. We have evidences Ej = E2 = c. What is the updated belief B2(X) = P(X2 | Ep = c, E2 = c)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts