

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
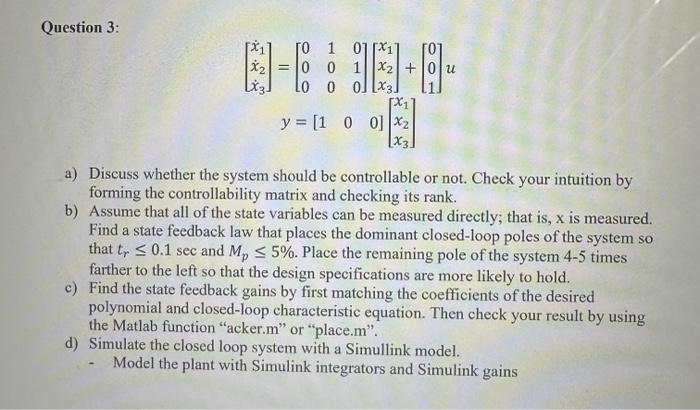
Question 3: x1x2x3=000100010x1x2x3+001uy=[100]x1x2x3 a) Discuss whether the system should be controllable or not. Check your intuition by forming the controllability matrix and checking its rank.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Modern Quantum Mechanics
Authors: J.J Sakurai
Revised Edition
9781108499996, 201539292, 978-0201539295