

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
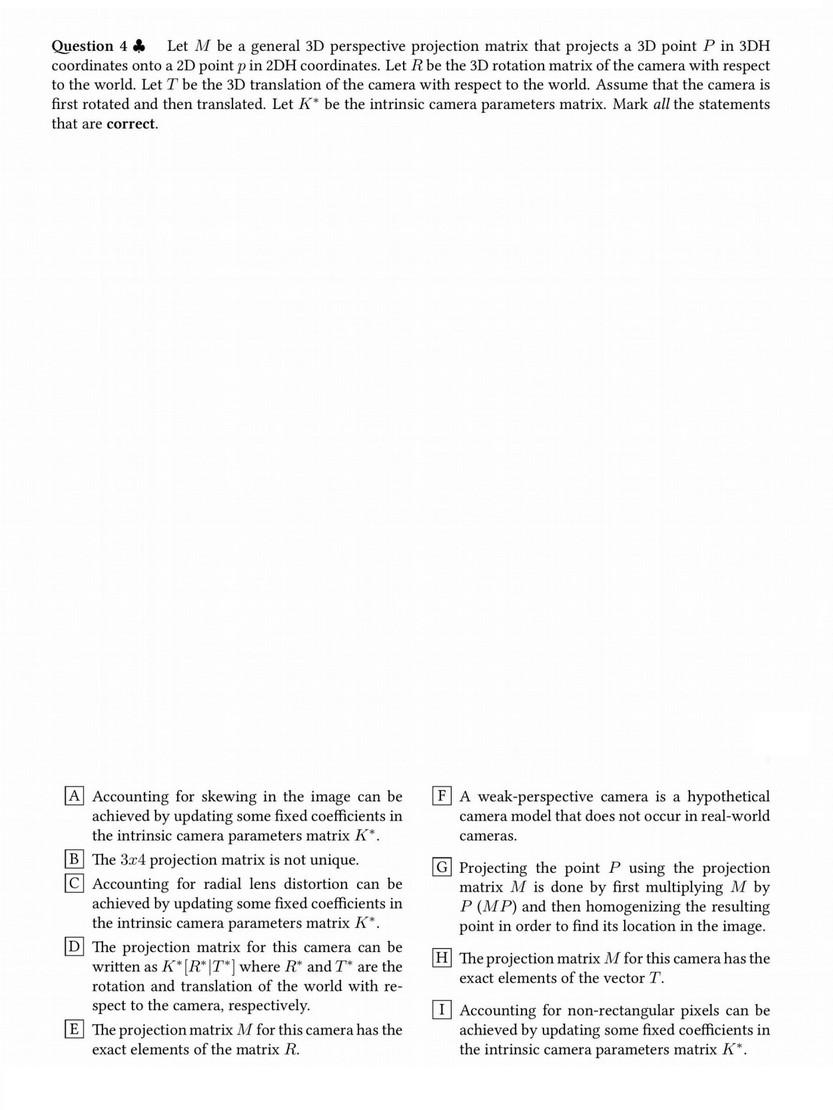
Question 4% Let M be a general 3D perspective projection matrix that projects a 3D point P in 3DH coordinates onto a 2D point p
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Directions In Databases 12th British National Conference On Databases Bncod 12 Guildford United Kingdom July 6 8 1994 Proceedings Lncs 826
Authors: David S. Bowers
1994th Edition
3540582355, 978-3540582359