

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Trajectory generation is an essential knowledge in robotics because it allows the time history of position, velocity and acceleration to be specified for each
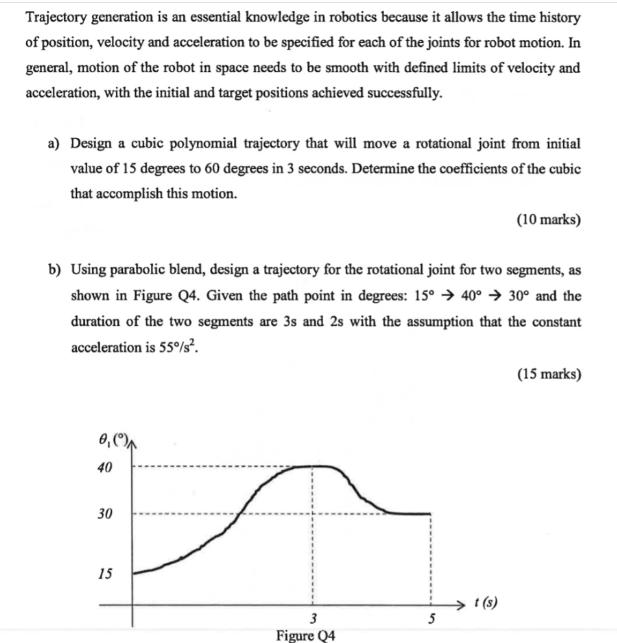
Trajectory generation is an essential knowledge in robotics because it allows the time history of position, velocity and acceleration to be specified for each of the joints for robot motion. In general, motion of the robot in space needs to be smooth with defined limits of velocity and acceleration, with the initial and target positions achieved successfully. a) Design a cubic polynomial trajectory that will move a rotational joint from initial value of 15 degrees to 60 degrees in 3 seconds. Determine the coefficients of the cubic that accomplish this motion. b) Using parabolic blend, design a trajectory for the rotational joint for two segments, as shown in Figure Q4. Given the path point in degrees: 15 40 30 and the duration of the two segments are 3s and 2s with the assumption that the constant acceleration is 55/s. 0,() 40 30 15 3 Figure Q4 (10 marks) 5 (15 marks)
Step by Step Solution
There are 3 Steps involved in it
Step: 1
a To design a cubic polynomial trajectory for a rotational joint we can use the equation t a bt ct2 dt3 where t is the joint angle at time t and a b c ...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Physics
Authors: Alan Giambattista, Betty Richardson, Robert Richardson
2nd edition
77339681, 978-0077339685