

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Question B 2 . Consider the 5 - DoF robot arm shown in the Figure B 2 . The joint configuration vector of this robot
Question B
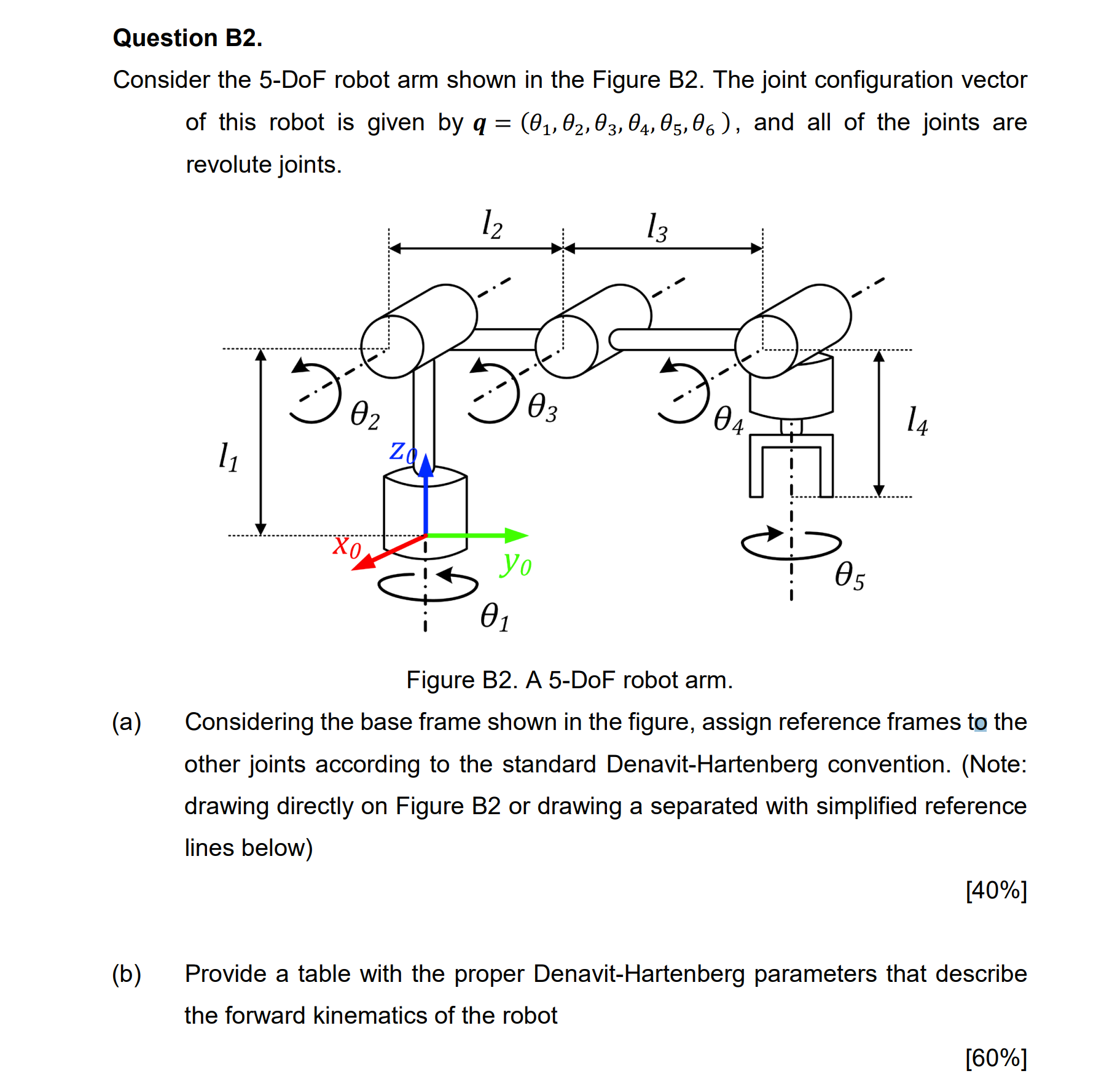
Consider the DoF robot arm shown in the Figure B The joint configuration vector of this robot is given by and all of the joints are revolute joints.
Figure B A DoF robot arm.
a Considering the base frame shown in the figure, assign reference frames to the other joints according to the standard DenavitHartenberg convention. Note: drawing directly on Figure B or drawing a separated with simplified reference lines below
b Provide a table with the proper DenavitHartenberg parameters that describe the forward kinematics of the robot
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Relational Theory For Computer Professionals What Relational Databases Are Really All About
Authors: C J Date
1st Edition
1449369464, 9781449369460