

Question
R E + Y C'(s) P(s) Figure 1: Unity-Feedback System Design Objectives: Find a controller C(s) such that the following are satisfied: i) The
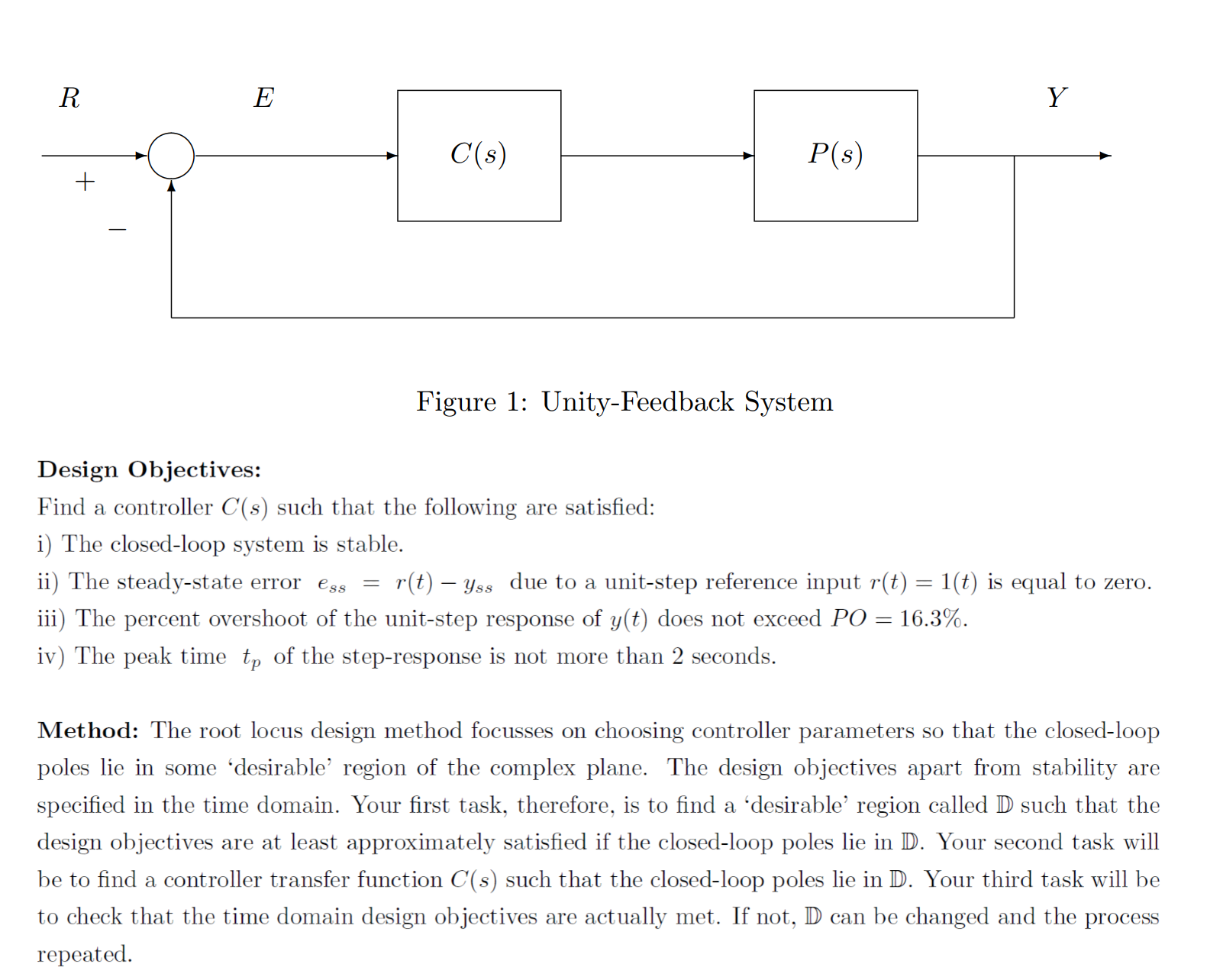
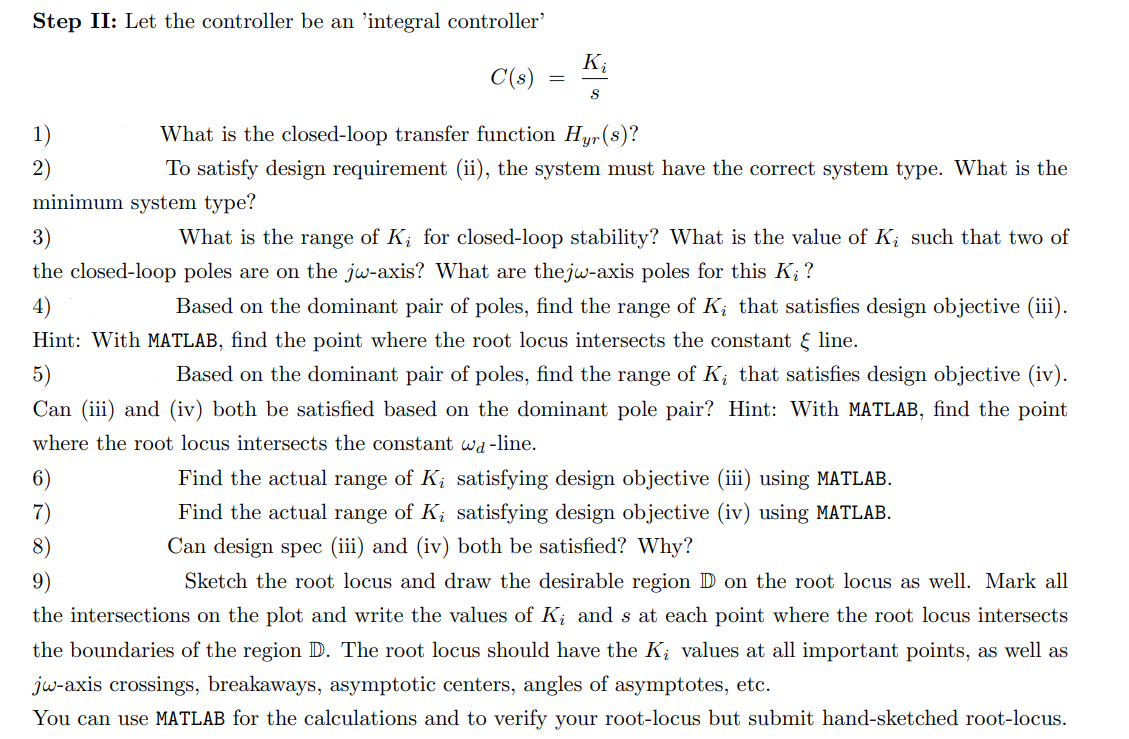
R E + Y C'(s) P(s) Figure 1: Unity-Feedback System Design Objectives: Find a controller C(s) such that the following are satisfied: i) The closed-loop system is stable. = ii) The steady-state error ess r(t)yss due to a unit-step reference input r(t) = 1(t) is equal to zero. iii) The percent overshoot of the unit-step response of y(t) does not exceed PO = 16.3%. iv) The peak time tp of the step-response is not more than 2 seconds. Method: The root locus design method focusses on choosing controller parameters so that the closed-loop poles lie in some 'desirable' region of the complex plane. The design objectives apart from stability are specified in the time domain. Your first task, therefore, is to find a desirable' region called D such that the design objectives are at least approximately satisfied if the closed-loop poles lie in D. Your second task will be to find a controller transfer function C(s) such that the closed-loop poles lie in D. Your third task will be to check that the time domain design objectives are actually met. If not, D can be changed and the process repeated. Step II: Let the controller be an 'integral controller' Ki C'(s) = S 1) What is the closed-loop transfer function Hyr(s)? To satisfy design requirement (ii), the system must have the correct system type. What is the minimum system type? 3) What is the range of K; for closed-loop stability? What is the value of K; such that two of the closed-loop poles are on the jw-axis? What are thejw-axis poles for this Ki? 4) Based on the dominant pair of poles, find the range of Ki that satisfies design objective (iii). Hint: With MATLAB, find the point where the root locus intersects the constant & line. 5) Based on the dominant pair of poles, find the range of K; that satisfies design objective (iv). Can (iii) and (iv) both be satisfied based on the dominant pole pair? Hint: With MATLAB, find the point where the root locus intersects the constant wa-line. 6) 7) 8) 9) Find the actual range of K satisfying design objective (iii) using MATLAB. Find the actual range of K satisfying design objective (iv) using MATLAB. Can design spec (iii) and (iv) both be satisfied? Why? Sketch the root locus and draw the desirable region D on the root locus as well. Mark all the intersections on the plot and write the values of Ki and s at each point where the root locus intersects the boundaries of the region D. The root locus should have the Ki values at all important points, as well as jw-axis crossings, breakaways, asymptotic centers, angles of asymptotes, etc. You can use MATLAB for the calculations and to verify your root-locus but submit hand-sketched root-locus.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access with AI-Powered Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Essentials of Contemporary Management
Authors: Gareth Jones, Jennifer George
5th edition
?978-0077439477
