

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
The last three links in a robot arm are arranged according to Euler angles rotations as follows. Rotation around z axis with an angle
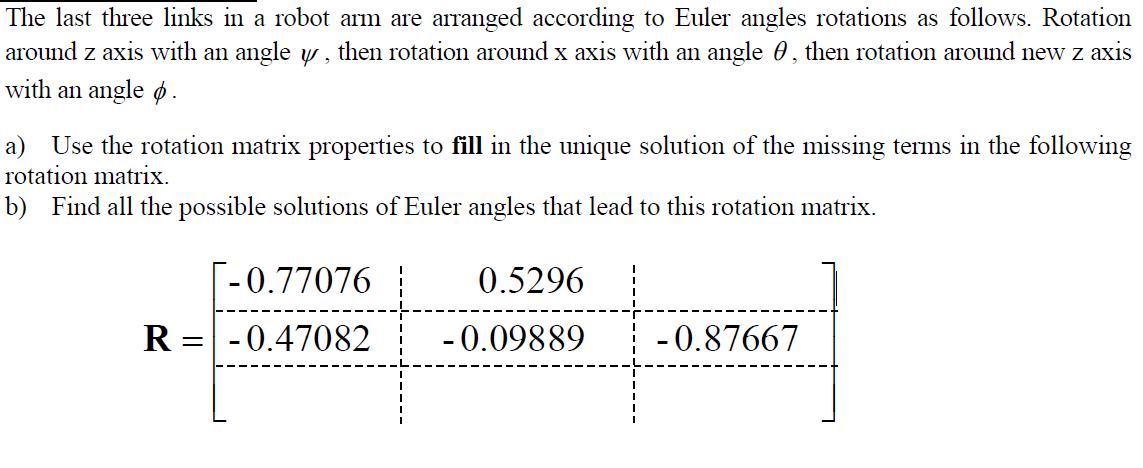
The last three links in a robot arm are arranged according to Euler angles rotations as follows. Rotation around z axis with an angle y , then rotation around x axis with an angle 0, then rotation around new z axis with an angle . a) Use the rotation matrix properties to fill in the unique solution of the missing terms in the following rotation matrix. b) Find all the possible solutions of Euler angles that lead to this rotation matrix. -0.77076 0.5296 R = -0.47082 -0.09889 - 0.87667
Step by Step Solution
There are 3 Steps involved in it
Step: 1
Regularly the worlds Zhub alludes to the pivot that stretches from the sky to the groundI...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Modern Control Systems
Authors: Richard C. Dorf, Robert H. Bishop
12th edition
136024580, 978-0136024583