

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Shown below is a robot arm with three revolute joints. Coordinate system fixed to the base link, Link 0. Solving the forward kinematic to
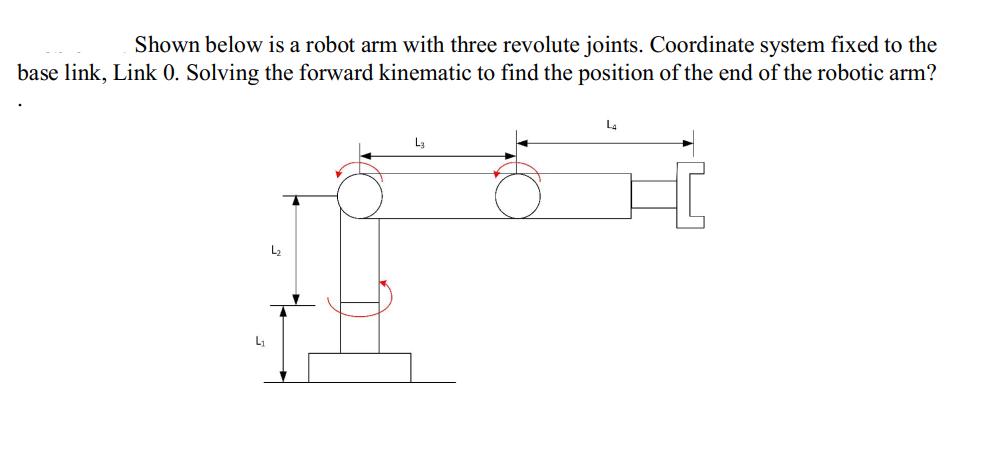
Shown below is a robot arm with three revolute joints. Coordinate system fixed to the base link, Link 0. Solving the forward kinematic to find the position of the end of the robotic arm? L L L4
Step by Step Solution
★★★★★
3.38 Rating (157 Votes )
There are 3 Steps involved in it
Step: 1
VThe forward kinematics of a robot arm with three revolute joints can be solved using the DenavitHar...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Cornerstones of Managerial Accounting
Authors: Mowen, Hansen, Heitger
3rd Edition
324660138, 978-0324660135