

Question: Solve on gearsbot Objective: In this assignment, you are required to configure a robot to complete a specific mission. The mission involves perception and planning
Solve on gearsbot
Objective:
In this assignment, you are required to configure a robot to complete a specific mission. The mission involves perception and planning tasks using sensors including a camera sensor to identify and manipulate objects in a controlled environment. The goal is to achieve accurate autonomous navigation while avoiding collisions and following the task's constraints.
Mission Description:
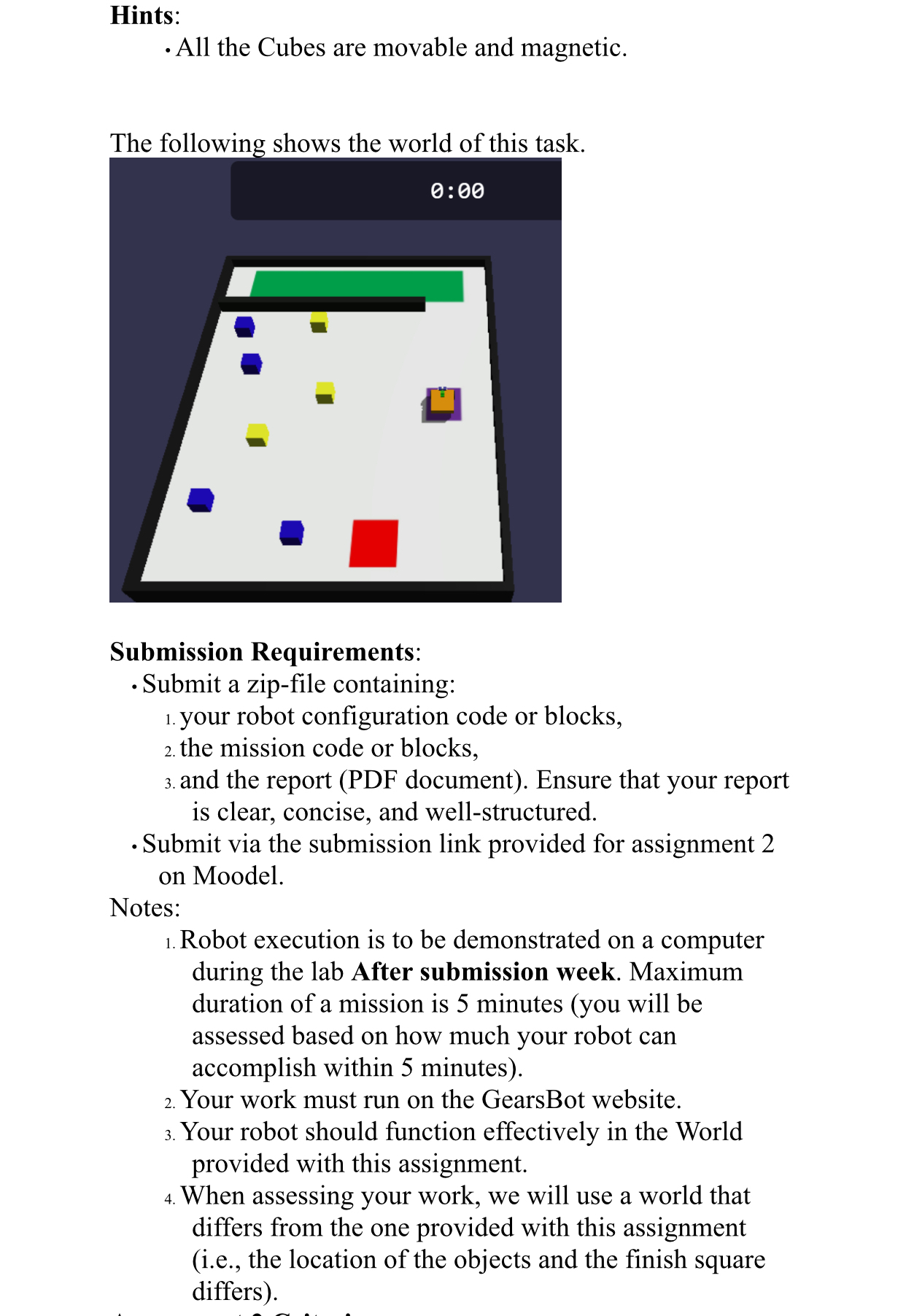
Task Overview: The robot's mission is to autonomously collect the yellow cubes from the environment and transport them to the designated green area. Once all the yellow cubes have been collected and placed in the green area, the robot must navigate to and park in the red zone.
Environmental Obstacles:
Blue Cubes: The robot must avoid any collision with the blue cubes placed within the environment.
Green Area Cubes: The robot should not collide with any cubes that have already been placed in the green area.
Requirements:
Robot Configuration:
The robot must be equipped with a suitable set of sensors for the task, with mandatory use of a camera sensor for object recognition.
You must carefully choose the other sensors eg ultrasonic, Gyro, or GPS etc to assist with obstacle detection, localization, and navigation.
Robot Behavior:
The robot must autonomously detect and collect all the yellow cubes.
After collecting each yellow cube, the robot should transport it to the green area without colliding with other objects or obstacles.
After all yellow cubes have been successfully transported, the robot must navigate to the red parking zone and park.
Deliverables:
Robot Configuration and Implementation:
Configure the robot using appropriate sensors and control the robot to successfully complete the mission.
The implementation must ensure the robot accurately perceives its environment and finds a path to fulfil the mission's objectives.
Hints:
All the Cubes are movable and magnetic.
The following shows the world of this task.
Submission Requirements:
Submit a zipfile containing:
your robot configuration code or blocks,
the mission code or blocks,
and the report PDF document Ensure that your report is clear, concise, and wellstructured.
Submit via the submission link provided for assignment on Moodel.
Notes:
Robot execution is to be demonstrated on a computer during the lab After submission week. Maximum duration of a mission is minutes you will be assessed based on how much your robot can accomplish within minutes
Your work must run on the GearsBot website.
Your robot should function effectively in the World provided with this assignment.
When assessing your work, we will use a world that differs from the one provided with this assignment ie the location of the objects and the finish square differs
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock