

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
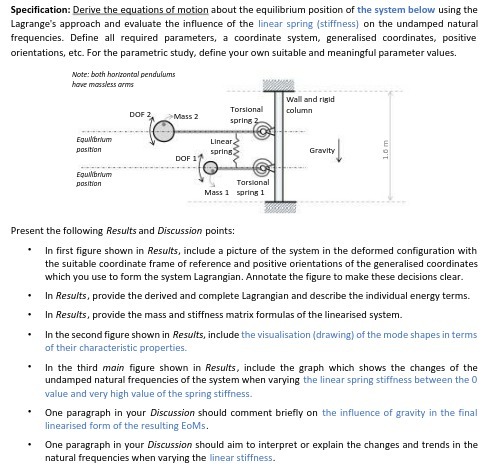
Specification: Derive the equations of motion about the equilibrium position of the system below using the Lagrange's approach and evaluate the influence of the linear
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Ferroelectric Devices
Authors: Kenji Uchino
2nd Edition
1351834274, 9781351834278